医療・福祉ロボット開発で少子高齢化問題に挑む
理工学部機械工学科機械工学専修 石井 千春(いしい ちはる) 教授
 石井 千春教授
石井 千春教授
力覚フィードバック機能付き単孔式腹腔鏡下手術支援ロボットを開発
世界でも最もその割合が進んでいると言われる日本の少子高齢化。課題低減策の一つとして、2014年6月に発表された政府の「日本再興戦略」でも医療・福祉分野での「ロボットによる新たな産業革命の実現」がうたわれています。
石井教授が現在、研究室内で最も熱を注いでいる研究もその一つ、単孔式腹腔鏡下手術支援ロボット(以下、単孔式ロボット)です。
「医師の遠隔操作により体に小さく開けた穴から器具を入れて治療する、いわゆる内視鏡手術の支援ロボットです。既に米国企業が開発した手術支援ロボット『ダ・ヴィンチ』をはじめ、腹部に3~5つ穴を開ける多孔式の導入が世界中で進められていますが、『単孔式』は穴の数をさらに減らし、へそ1つで行おうというもの。これまで以上に整容性が高く、患者の負担や合併症のリスクなどを減らせると期待されているんですよ」と、石井教授は研究意義を語ります。
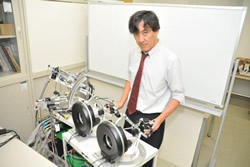
 特許出願中の単孔式腹腔鏡下手術支援ロボット。医師の声を生かし開発に臨んだ
特許出願中の単孔式腹腔鏡下手術支援ロボット。医師の声を生かし開発に臨んだ
腹腔鏡下手術ロボットは、医師側(マスター)と患者側(スレーブ)の2つの装置(マニピュレータ)から成るマスター・スレーブ型と呼ばれる方式。石井研究室ではスレーブの開発を中心に行っています。
手術を手掛ける「鉗子」(ルビ:かんし)と呼ばれる2本のアーム(右手用・左手用)と1本の内視鏡を、「ポート」と呼ばれる筒で部分的に3本束ねて腹腔内に挿入し、医師が直接行う場合の単孔式腹腔鏡下手術と同等の可動域を確保。この際に2本の鉗子がポート(へそ部分)を支点に体内で交差し、鉗子の操作が左右入れ替わる課題に対しては石井教授が専門とする制御工学とロボット工学で実際の手の動きに鉗子先端の動きが対応するよう処理。さらに、力覚フィードバック機能を付加させました。
「力覚は五感のうち触覚に相当する感覚情報です。鉗子先端で臓器を掴んだ際の把持力はオブザーバと呼ばれる理論により推定し、さらに鉗子軸に掛かる上下、左右、前後からの弾力は6軸力覚センサーで測定し、力覚を制御しています。鉗子がモニター範囲から外れた際に他の臓器を傷つけるという医療事故を防ぐためにも、視覚以外の感覚を得ることは異常を感知する上で有効だと考えています」。単孔式ロボットは現在、特許を出願しています。
 操縦装置を既製の電動車いすに取り付けて、筋電位で操縦可能な電動車いす
操縦装置を既製の電動車いすに取り付けて、筋電位で操縦可能な電動車いす
 介護者の腰の負担を軽減する軽量パワーアシストスーツ。今後は臨床実験を行い、実用化を目指している
介護者の腰の負担を軽減する軽量パワーアシストスーツ。今後は臨床実験を行い、実用化を目指している
現場でこそ役立つ製品を
単孔式ロボットは、本学での石井研究室5年目の節目として10月に参加したロボットの展示会「Japan Robot Week 2014」に出展。世界最大の米国経済新聞"The Wall Street Journal"オンライン版に掲載された同展示会記事でも、最注目5製品の一つとして紹介されました。
同展示会では単孔式ロボットのほか、生体信号で操縦する電動車いすとパワーアシストスーツも展示。電動車いすは、頸・両肩・頬の筋肉を動かしたときに発生する電気信号(筋電位)を利用し、手を使わずとも前進後進・旋回などの動きができる仕組みで、操縦装置を操作レバー(ジョイスティック)部分に取り付けることで、既製の電動車いすでも利用可能。パワーアシストスーツはつなぎ服の背面に空気圧を利用した人工筋肉をつけ、主に腰への負担軽減と着脱のしやすさを目的にしたものです。
「特にパワーアシストスーツはとても簡単な装置なんですけれど」と笑う石井教授。石井研究室では、筋肉の電気信号を読み解きロボットハンドを制御する筋電義手や、力覚提示技術を生かした内視鏡手術トレーニングシステムなども開発していますが、展示会で敢えて技術の難易度にとらわれないパワーアシストスーツの展示を行ったことに対し、「開発したパワーアシストスーツは装置が簡易である分、製造コストが抑えられ、軽量かつ着脱も容易。展示を見ていただいた多くの方からも賛同いただき、今の福祉の現場に適う製品だと思っています」。展示した製品はいずれも、国内外のメディア、医療・福祉関係者、企業、大学など多くの反響を得て、商品化に向けた展開が模索されています。
「技術を扱う者として、医療・福祉分野での開発は自らのスキルを社会に役立てられる"この上のない"生きた研究テーマだと感じています。特に日本は、実用化に至る速度は遅いですが、技術開発面では世界をリードする国の一つ。必然的に最先端の開発に携われます」
 Japan Robot Week 2014にて。「石井教授のもとで学びたい」と法政に入学したゼミ生もいる石井研究室は、日本の少子高齢化問題に対し高い問題意識で研究に取り組んでいる
Japan Robot Week 2014にて。「石井教授のもとで学びたい」と法政に入学したゼミ生もいる石井研究室は、日本の少子高齢化問題に対し高い問題意識で研究に取り組んでいる
最先端の医療福祉技術を学びたいと、ゼミ生の中には石井研究室を目指して本学に入学した学生も。「私も学生から多くの刺激をもらっています。研究室でも機会があれば医療・福祉施設を訪れるようにしていますが、学生が自主的に現場訪問するなど法政は志の高い学生が多いですね。研究成果を国際社会に公表することも重要。今年度は4人の大学院生が海外の国際会議で発表を行いました」。研究活動が活発な石井研究室は石井教授の趣味であるテニスも時折行い、多様に互いの成長を育んでいます。
石井千春教授 医療・福祉ロボティクス研究室:http://mwrlab.ws.hosei.ac.jp/
- 理工学部機械工学科機械工学専修 石井 千春(いしい ちはる)
1992年 上智大学理工学部機械工学科卒業
1997年 上智大学理工学部機械工学専攻博士後期課程修了 博士(工学)
工学院大学准教授などを経て、2010年より法政大学理工学部機械工学科機械工学専修准教授、2011年より現職。
“2013 International Conference on Intelligent Mechatronics and Automation”におけるBest Presentation Awardの受賞をはじめ、研究者・教育者として国内外における数々の賞を受賞。著書に『Scilabで学ぶシステム制御の基礎』(共著、オーム社、2007年)など。
<教員・研究紹介>新着記事
 生命科学部 応用植物科学科
生命科学部 応用植物科学科  キャリアデザイン学部 キャリアデザイン学科
キャリアデザイン学部 キャリアデザイン学科 現代福祉学部 臨床心理学科
現代福祉学部 臨床心理学科<教員・研究紹介>
バックナンバー
 デザイン工学部都市環境デザイン工学科
デザイン工学部都市環境デザイン工学科 人間環境学部人間環境学科
人間環境学部人間環境学科 社会学部社会政策科学科
社会学部社会政策科学科全ての記事を見る▼
 キャリアデザイン学部キャリアデザイン学科
キャリアデザイン学部キャリアデザイン学科 理工学部応用情報工学科
理工学部応用情報工学科 情報科学部ディジタルメディア学科
情報科学部ディジタルメディア学科 社会学部メディア社会学科
社会学部メディア社会学科 人間環境学部人間環境学科
人間環境学部人間環境学科 現代福祉学部福祉コミュニティ学科
現代福祉学部福祉コミュニティ学科 スポーツ健康学部スポーツ健康学科
スポーツ健康学部スポーツ健康学科 文学部心理学科
文学部心理学科 生命科学部応用植物科学科
生命科学部応用植物科学科 国際文化学部国際文化学科
国際文化学部国際文化学科 経営学部経営学科
経営学部経営学科 経済学部経済学科
経済学部経済学科 理工学部経営システム工学科
理工学部経営システム工学科 法学部国際政治学科
法学部国際政治学科 キャリアデザイン学部キャリアデザイン学科
キャリアデザイン学部キャリアデザイン学科 情報科学部ディジタルメディア学科
情報科学部ディジタルメディア学科
 人間環境学部人間環境学科
人間環境学部人間環境学科 生命科学部環境応用化学科
生命科学部環境応用化学科 デザイン工学部都市環境デザイン工学科
デザイン工学部都市環境デザイン工学科 社会学部メディア社会学科
社会学部メディア社会学科 スポーツ健康学部スポーツ健康学科
スポーツ健康学部スポーツ健康学科 グローバル教養学部(GIS)
グローバル教養学部(GIS) 現代福祉学部福祉コミュニティ学科
現代福祉学部福祉コミュニティ学科 社会学部社会政策科学科
社会学部社会政策科学科 情報科学部コンピュータ科学科
情報科学部コンピュータ科学科 国際文化学部国際文化学科
国際文化学部国際文化学科 理工学部応用情報工学科
理工学部応用情報工学科 経営学部経営学科
経営学部経営学科 生命科学部応用植物科学科
生命科学部応用植物科学科 文学部史学科
文学部史学科 経済学部経済学科
経済学部経済学科 理工学部創生科学科
理工学部創生科学科 デザイン工学部建築学科
デザイン工学部建築学科 スポーツ健康学部スポーツ健康学科
スポーツ健康学部スポーツ健康学科 現代福祉学部福祉コミュニティ学科
現代福祉学部福祉コミュニティ学科 人間環境学部人間環境学科
人間環境学部人間環境学科 キャリアデザイン学部キャリアデザイン学科
キャリアデザイン学部キャリアデザイン学科 生命科学部環境応用化学科
生命科学部環境応用化学科 社会学部社会学科
社会学部社会学科 経営学部市場経営学科
経営学部市場経営学科 情報科学部ディジタルメディア学科
情報科学部ディジタルメディア学科 国際文化学部国際文化学科
国際文化学部国際文化学科 経営学部市場経営学科
経営学部市場経営学科 理工学部電気電子工学科
理工学部電気電子工学科 文学部哲学科
文学部哲学科 経済学部経済学科
経済学部経済学科 生命科学部応用植物科学科
生命科学部応用植物科学科 現代福祉学部福祉コミュニティ学科
現代福祉学部福祉コミュニティ学科 法学部法律学科
法学部法律学科 GIS(グローバル教養学部)
GIS(グローバル教養学部) デザイン工学部都市環境デザイン工学科
デザイン工学部都市環境デザイン工学科 スポーツ健康学部
スポーツ健康学部 経営学部経営学科
経営学部経営学科 文学部英文学科
文学部英文学科 日本統計研究所所長 経済学部経済学科
日本統計研究所所長 経済学部経済学科 法科大学院(専門職大学院 法務研究科) 弁護士
法科大学院(専門職大学院 法務研究科) 弁護士 情報メディア教育研究センター所長/デザイン工学部システムデザイン学科
情報メディア教育研究センター所長/デザイン工学部システムデザイン学科 野上記念法政大学能楽研究所所長
野上記念法政大学能楽研究所所長 大学院理工学研究科生命機能学専攻
大学院理工学研究科生命機能学専攻 大学院理工学研究科システム工学専攻/理工学部経営システム工学科
大学院理工学研究科システム工学専攻/理工学部経営システム工学科 大学院公共政策研究科(サステイナビリティ学専攻)/人間環境学部
大学院公共政策研究科(サステイナビリティ学専攻)/人間環境学部 大学院(連帯社会インスティテュート運営委員長)
大学院(連帯社会インスティテュート運営委員長) 経営大学院(専門職大学院 イノベーション・マネジメント研究科 イノベーション・マネジメント専攻)
経営大学院(専門職大学院 イノベーション・マネジメント研究科 イノベーション・マネジメント専攻) 人間環境学部人間環境学科
人間環境学部人間環境学科 キャリアデザイン学部キャリアデザイン学科
キャリアデザイン学部キャリアデザイン学科 国際文化学部国際文化学科
国際文化学部国際文化学科 現代福祉学部福祉コミュニティ学科
現代福祉学部福祉コミュニティ学科 社会学部メディア社会学科
社会学部メディア社会学科 経営学部市場経営学科
経営学部市場経営学科 理工学部機械工学科機械工学専修
理工学部機械工学科機械工学専修 スポーツ健康学部スポーツ健康学科
スポーツ健康学部スポーツ健康学科 生命科学部応用植物科学科
生命科学部応用植物科学科 経済学部経済学科
経済学部経済学科 社会学部社会学科
社会学部社会学科 文学部哲学科
文学部哲学科 情報科学部ディジタルメディア学科
情報科学部ディジタルメディア学科 法学部法律学科
法学部法律学科 デザイン工学部建築学科
デザイン工学部建築学科NEWS
- 2025.2.7 【第8回自由を生き抜く実践知大賞】課題解決に貢献する研究賞「アーバンデータチャレンジ2023 金賞」
- 2025.1.31 人間環境学部金藤正直教授ゼミナールの学生が株式会社エイチラボとオーガニックルイボスティーを開発・販売
- 2025.1.29 「開かれた法政21」学術・文化奨励金授与式及び懇親会を実施しました
- 2025.1.27 「観世寿夫記念法政大学能楽賞」「催花賞」の贈呈式を開催
- 2025.1.24 法政大学と滋賀県が就職協定を締結しました
- 2025.1.17 健康スープでSDGsを実践するイベントを開催しました
- 2025.1.10 第20回デジタルコンテンツ・コンテスト表彰式を開催しました
- 2024.12.24 「法政大学元総長 清成忠男先生 お別れの会」を挙行しました
- 2024.12.23 2024年度(第8回)「自由を生き抜く実践知大賞」表彰式を開催しました
- 2024.12.20 輪島塗救出プロジェクト・チャリティーイベントを開催しました
- 2024.12.20 多摩キャンパス開設40周年記念×第40回多摩シンポジウム「社会課題解決にチャレンジするソーシャル・イノベーター」
- 2024.12.19 3大学共催学生参画型「データサイエンス・アイデアコンテスト2024」開催報告 ~ 『人生100年時代のキャリア形成』~
- 2024.12.18 Team Ethical:100円モーニング企画を実施しました
- 2024.12.17 全国大学生マーケティングコンテストで法政GIS福岡ゼミから出場したチームが7年連続優勝!
- 2024.12.16 アメリカンフットボール部が甲子園ボウルで激闘 2年連続準優勝しました!
- 2024.12.13 「関西大学×法政大学 SDGsアクションプランコンテスト2024」で法政大学現代福祉学部佐野ゼミとスポーツ健康学部吉田ゼミ有志によるチームが大阪・関西万博賞他2賞を受賞
- 2024.12.9 体育会サッカー部から6人がJリーグ加入内定!合同記者会見を開催しました
- 2024.12.4 法政大学が学生の社会的起業を支援するプログラム 「チェンジメーカーズラボ in 多摩(たまらぼ)」最終報告会を開催 最優秀賞はバス通学を便利にする学生×飲食店をつなぐアプリの開発
- 2024.12.3 第43回多摩キャンパスコンサートが5年ぶりに大ホールで開催されました
- 2024.12.3 人間環境学部設置25周年記念祝賀行事を実施しました
- 2024.12.3 法政大学と加賀市が連携に関する協定を締結
- 2024.12.3 2024年度第20回デジタルコンテンツ・コンテスト入賞・入選作品が決定しました
- 2024.11.29 Team Ethical:八百屋/HTLプロジェクト フードドライブ企画を開催しました
- 2024.11.25 2024年度企画展「へび・知るんじゃ展〜からまる信仰と畏れ〜」
- 2024.11.18 受験生向け大学案内動画(2024年公開)
- 2024.11.15 法政大学 次期総長候補者にコー・ダイアナ(グローバル教養学部教授・常務理事・副学長)を選出 2025年3月31日に就任
- 2024.11.14 2024年度SIC教育プログラム「チェンジメーカーズラボ in 多摩(たまらぼ)」DEMO DAYを開催しました
- 2024.11.12 法学部の廣瀬・土山ゼミの学生が「公共政策フォーラム2024 in 会津若松」 において日本公共政策学会長賞(最優秀賞)を受賞しました
- 2024.11.8 理工学研究科の在学生が第8回抗酸菌研究会で第8回抗酸菌研究会奨励賞を受賞
- 2024.11.7 法政大学が「SDGs WEEKs 2024」「DIVERSITY WEEKs 2024」を11月18日(月)〜11月30日(土)に開催 無料生理用品配布の試行など20以上のプログラムを実施