


トップ>オピニオン>生物の動きに学ぶロボット開発の最前線 〜ミミズがロボットの先生だった!?〜
 一覧
一覧

中村 太郎 【略歴】
生物の動きに学ぶロボット開発の最前線
〜ミミズがロボットの先生だった!?〜
中村 太郎/中央大学理工学部教授
専門分野 ロボティクス・メカトロニクス、機械システム、知能機械学
1.はじめに
最近、カタツムリの殻からヒントを得た汚れにくい壁面タイルやカモノハシの嘴の形にまねた新幹線のノーズなど、生物の機能や形から学んだ様々な製品が実用化されている。これらは、バイオミメティクスとよばれ、次世代のものづくり産業におけるイノベーティブな技術的思想として注目を集めている。
翻って、現在日本がリードしているロボティクス・メカトロニクスの分野に目を向けてみよう。ロボットの重要な役割の一つとして、人間の入り込めないような極限環境(体内、災害現場、宇宙、深海など)での作業が求められている。一方、地球上には長い進化の過程を経てそれぞれの環境に最適な形態で適応した生物が多く存在する。したがって、上記のような環境で生息するような生物の機能を真似たロボットを開発することによって、様々な応用分野への可能性が期待できる。
著者らは、ミミズ、アメンボ、カタツムリ、象の鼻など、種々の生物の機能を規範としたロボットを開発し、宇宙・医療福祉・海底資源探査など、様々な分野への応用を検討している。本稿では、特にミミズの動きに着目したロボット達について紹介する。(他の生物型ロボットについては中村研HPを参照)
2.ミミズの蠕動運動とその特徴
ミミズをじっくり観察したことがあるだろうか? 著者は子供のころよくミミズを観察していたが、どうやらヘビや尺取虫とは違う動きのようで、“うにょうにょ”動く。実はこの“うにょうにょ”は、「蠕動運動」という運動によるものである(図1、動画1![]() )。蠕動運動とは人間の食道や腸などにも見られる運動で、縦波の伸縮波を一定方向に進行させることによって、対象物を移動させることができる運動である。蠕動運動による移動は速度が遅く、一見効率の悪い運動のように見える。しかし、移動に必要な空間が最も小さく(図2)、周辺環境に対して接地面積を大きく確保することができるなど、他の移動機構には見られない独創的かつ有用な機能を持った移動手段である。
)。蠕動運動とは人間の食道や腸などにも見られる運動で、縦波の伸縮波を一定方向に進行させることによって、対象物を移動させることができる運動である。蠕動運動による移動は速度が遅く、一見効率の悪い運動のように見える。しかし、移動に必要な空間が最も小さく(図2)、周辺環境に対して接地面積を大きく確保することができるなど、他の移動機構には見られない独創的かつ有用な機能を持った移動手段である。
図1 ミミズの移動様式
図2 様々な移動様式
3.ミミズ型ロボットの開発と様々な分野への応用

図3 ミミズロボットのプロットタイプ
まず図3のようなミミズの蠕動運動をロボット化したプロットタイプを試作した。動画2![]() にプロットタイプのミミズ型ロボットの移動の様子を示す。なお、この動画にあるようにこの運動機構は管内を「うにょうにょ」進み、上昇することも簡単に実現できる。
にプロットタイプのミミズ型ロボットの移動の様子を示す。なお、この動画にあるようにこの運動機構は管内を「うにょうにょ」進み、上昇することも簡単に実現できる。
●体の中で活躍する!〜大腸内視鏡搭載型蠕動運動ロボット〜
図4に医療用に用いられるミミズ型ロボットを示す。本ロボットはミミズの蠕動運動による推進機構の中に既存の大腸内視鏡が搭載されている。ユニットおよびその駆動力には、人体への適合性を考慮に入れて、著者らの研究室で独自に開発している軸方向繊維強化型人工筋肉(http://www.yomiuri.co.jp/adv/chuo/research/20100318.htm)を採用している。この人工筋肉は空気圧を印加すると、「収縮・膨張」するため、蠕動運動のユニットとして利用することができる。動画3に本ロボットが管内を走行して様子を示す。
現在、医師が練習用で用いている大腸モデル(図5・動画4![]() )や、摘出した豚の大腸を使った実験でも数分程度と短時間での推進・通過を確認している(図6)。
)や、摘出した豚の大腸を使った実験でも数分程度と短時間での推進・通過を確認している(図6)。

図4 内視鏡搭載型ミミズロボット
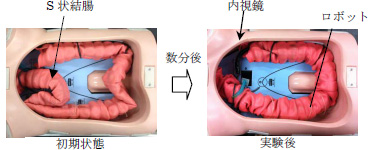
図5 体内モデルの挿入実験

図6 摘出した豚の大腸を用いた挿入実験
●月面に穴を掘る!地下資源の探査にも期待! 〜埋没型月・惑星掘削ロボットの開発〜
月や惑星への地震計の設置やレゴリス(月の砂)層中の地下資源の探索のために、月・惑星の地中探査ができる埋没型ロボットが求められている。図7に蠕動運動を用いた地中探査ロボットの概要を示す。本ロボットは、レゴリスの掘削・運搬にはアースオーガを、推進・反力支持機構にミミズの蠕動運動を用いることで、土圧や重力の影響を受けない全く新しい掘削ロボットの構築を目指している(図8)。図9・動画5![]() に土中を掘削している月地中探査ロボットを示す。これらのユニットの膨張収縮を繰り返すことで土圧の影響が無視され、理論上はどこまでも掘り進むことができる。
に土中を掘削している月地中探査ロボットを示す。これらのユニットの膨張収縮を繰り返すことで土圧の影響が無視され、理論上はどこまでも掘り進むことができる。
現在、このミミズ型掘削ロボットは、地球上においても深海底に潜むレアアースや石油・鉱物などの新たな資源探査のための埋没型掘削ロボットとしても注目を集めている。
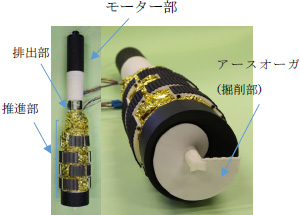
図7 蠕動運動型月地中探査ロボット
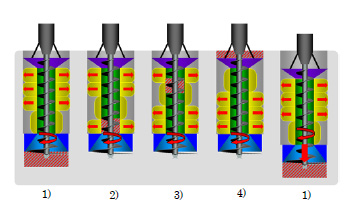
図8 蠕動ロボットの掘削
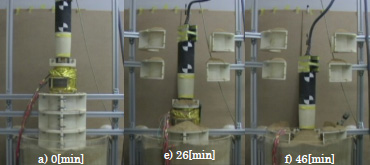
図9 地中探査ロボットの掘削の様子
●狭い管も何のその!〜細管内検査ロボットの開発〜
水道管やガス配管の細管としてよく用いられる25A管や15A管の検査には、工業用内視鏡を使用することが多い。しかし、曲管が多い配管や15m以上の長距離下においては周囲の摩擦の影響で、なかなか先に推し進めることができなくなるため、内視鏡のみで検査することが難しい。
したがって、ロボットによる走行機能を備えた内視鏡が求められている。しかし、管が非常に小さいため、カメラ等を備えたうえで複数のエルボ管等を含めた細管の走行は非常に困難であり、現在のところそのようなロボットは存在しない。そこで本研究では、ミミズの蠕動運動によるカメラ搭載可能な細管検査ロボットを開発した。図10に細管用検査ロボットを図11・動画6![]() にロボットが連続エルボ通過している様子を示す。本ロボットは内部にカメラが搭載されている。さらに、15Aや25A等の細管において複数の連続したエルボを通過しつつ15m以上の長距離の管も検査することができる。
にロボットが連続エルボ通過している様子を示す。本ロボットは内部にカメラが搭載されている。さらに、15Aや25A等の細管において複数の連続したエルボを通過しつつ15m以上の長距離の管も検査することができる。

図10 細管用蠕動運動型検査ロボット
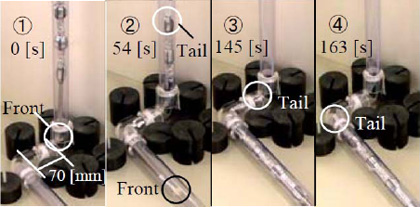
図11 連続エルボの通過試験(25A管)
●むにゅむにゅ動いて垂直搬送! 大腸の蠕動運動を規範としたポンプ
現在、自然災害時における土砂の搬送や下水処理、工場における食品や汚泥の搬送など、様々な場面において固液混合流体や高粘粘度流体の搬送装置が必要とされている。
そこで、腸管の蠕動運動に着目した。腸は固液混合流体や高粘度流体の搬送のみならず、固体と液体の混合・分離作業など様々な機能を有している。本研究では、上述の人工筋肉を用いて腸の蠕動運動による搬送を実現することで、様々な流体を垂直搬送に成功した。一例として図12・動画7![]() に固体含有率30%のときの固液体混合流体を垂直搬送している様子を示す。今後このポンプは、固液体の混合・分離や汚泥や食品、セメント等の搬送に応用することが期待されている。
に固体含有率30%のときの固液体混合流体を垂直搬送している様子を示す。今後このポンプは、固液体の混合・分離や汚泥や食品、セメント等の搬送に応用することが期待されている。

図12 蠕動ポンプが固液混合流体を垂直搬送する様子
4.おわりに
本稿ではミミズの蠕動運動を用いた様々なロボットを紹介した。前述したが、本研究室では、これらのミミズロボットの他にも、カタツムリの動きを規範とした全方向・壁のぼりロボットや象の鼻を模したクネクネしたロボット、アメンボの動きを模した水陸両用の環境調査ロボットなど、様々な生物の特徴を生かしたロボットの開発を行い、その応用を検討している。詳しくは中央大学理工学部中村研究室のHPを参照してほしい。
- 中村 太郎(なかむら・たろう)/中央大学理工学部教授
専門分野 ロボティクス・メカトロニクス、機械システム、知能機械学 - 1975年生まれ。信州大学大学院工学系研究科博士後期課程修了。1999年、秋田県立大学助手。2004年、中央大学理工学部専任講師、2006年、同大学准教授をへて、2013年より同大学教授。現在に至る。2012−2013年までスイス連邦工科大学ローザンヌ校Visiting Professor. 博士(工学)。人工筋肉や機能性流体等のスマートアクチュエータの開発と制御、および生物を規範としたバイオロボティクスの開発と応用に従事。2009年、日本ロボット学会研究奨励賞、2010年、日本機械学会研究奨励賞、2011年、文部科学大臣表彰若手科学者賞などを受賞。近著に「図解 人工筋肉」等がある。
- 中央大学バイオメカトロニクス研究室

