


 一覧
一覧

中村 太郎 【略歴】
教養講座
高出力人工筋肉の開発とロボットへの応用
中村 太郎/中央大学理工学部准教授
専門分野 ロボティクス・メカトロニクス、機械システム、知能機械学
著者の研究室では、介護ロボットやリハビリシステム、パワーアシストなど、人間とロボットが協調活動するようなシステムに必要とされる技術として、人間の筋肉のように柔らかく、かつ優れた特性をもったアクチュエータ(駆動装置)の開発を行っている。今回は、著者らの開発した世界最高レベルの高出力ゴム人工筋肉とロボットへの応用について解説したいとおもう。
1.ゴム人工筋肉とはなにか?
空気圧ゴム人工筋肉(以下:人工筋肉)とは、ゴムのような弾性媒体材に空気等の流体を注入して動力を得るアクチュエータのひとつである。つまり、風船のようなゴム材と繊維を複合させて、その中に空気圧を印加すると、ある特定の方向に収縮力が発生する駆動装置として捕らえるとわかりやすい。このアクチュエータは、一般のモータや油圧・空気圧機器のアクチュエータに比べて以下の特徴を持つ
- 軽量で出力密度が高い(軽いのに大きい力がでる)
- 水中で使用可能であるなど、耐環境性に優れている。
- 摺動部がないのでメンテナンスが容易
- 柔軟性があり、人間の筋特性と同様の特性を持っている
- 材料費が安価である
したがって、本アクチュエータは、工場内での直動アクチュエータとしての利用だけでなく、リハビリテーション機器やウェアラブルパワーアシスト等、人間に直接接触する機会の多い機械システムに適したアクチュエータとして注目されている。
現在、学術界や産業界で広く利用されている空気圧ゴム人工筋肉として、McKibben型人工筋肉が挙げられる。本人工筋肉は、1961年にJoseph McKibbenによって開発され、当初リハビリテーション用アクチュエータとして利用された。現在では、空気圧ゴム人工筋肉といえば、McKibben型を思い起こさせるほど一般的になった。しかしながら、本人工筋肉は、収縮率が20%程度と小さく、発生力も小さい。またゴムチューブとスリーブが擦れることによってゴム自体が磨耗することから寿命が短い等の欠点があった。
そこで、著者の研究室では、これらの欠点を克服するため、高出力で高寿命な軸方向繊維強化型空気圧ゴム人工筋肉を開発している。本解説では、開発された人工筋肉の詳細な構造やMcKibben型人工筋との比較を通して、本人工筋肉の有用性を解説していく。さらに、この人工筋肉を応用することで開発された、6自由度人工筋肉マニピュレータ、医療用内視鏡推進機構、蠕動運動ポンプ、人工筋肉ワイヤー等の紹介をする。
2.軸方向繊維強化型ゴム人工筋肉について
図1、2に開発された軸方向繊維強化型ゴム人工筋肉(以下:高出力人工筋肉)の構造と収縮メカニズムについて示す。ふつう、何も繊維拘束されていない竹輪のような形のゴムに空気圧を供給すると、風船のように軸方向にも半径方向にも膨張してしまい、直動的な収縮を得ることはできない(図1)。そこで、繊維を図2のように軸方向に繊維を拘束し空気圧を供給すると、軸方向には膨張せず、半径方向のみに膨張する。このとき、繊維の長さは伸びないので、軸方向に収縮力を得ることができる。この方法は流体の圧力をダイレクトにアクチュエータの収縮力として伝達することができる。さらに、強化繊維は人工筋肉のゴムチューブの中に内包することによって拘束繊維と弾性媒体との磨耗を避けている。また、この繊維を紐のような捩った繊維ではなく、マイクロレベルの細い繊維を層状に配置することで、大きな圧力まで耐えることができ、寿命も長くなる。動画1![]() に人工筋肉が収縮する様子を示す。なお、この動画は収縮が分かりやすいように意図的にゆっくりと収縮させている。
に人工筋肉が収縮する様子を示す。なお、この動画は収縮が分かりやすいように意図的にゆっくりと収縮させている。
3.従来の人工筋とどれくらい違うのか?
3.1 圧力―収縮率特性について
それぞれの人工筋肉の太さ、厚さ、長さ等の形状を一致させた場合の圧力-収縮率特性について実験的な比較を行った。図3に人工筋に圧力を加えていったときの収縮率の関係として、圧力-収縮率の関係を示す。
この図より同じ圧力で比べると高出力型の軸方向繊維強化型人工筋肉の方がMcKibben型人工筋肉よりも高い収縮率を示していることが分かる。さらに最大収縮率は、McKibben型人工筋肉が25%程度であるのに対して、軸方向繊維強化型人工筋肉は40%近い値を示している。さらに、耐圧力も本人工筋のほうがはるかに大きい。この収縮率は今のところ世界最高水準の収縮率である。
3.2 圧力―収縮力特性について
次に、同様の条件下における圧力-収縮力特性について実験的な比較を行った。図4に印加圧力-収縮力の関係を示す。この図より、同じ圧力で比べると軸方向繊維強化型人工筋肉の方がMcKibben型人工筋肉よりも5倍以上高い収縮力を示していることが分かる。さらに、最高圧力で比較すると、開発された人工筋肉は、たった約50gの重さでありながら、1000N(100kgf)程度出力していることが分かる。これは、McKibben型の8倍以上の出力がである。この収縮力も現在のところ世界最高水準の出力である。
4.高出力型人工筋肉と人間の筋肉との生体的比較
それでは、本人工筋肉を実際の人間の生体筋肉にどれくらい近いのかを比較してみる。実際の人間の生体筋の評価方法は主に、「等尺性収縮」と「等張性収縮」がある。等尺性収縮とは、筋肉を一定の長さに保ったときにどれくらい力が出せるか? といった静的な評価法であり、等張性収縮は筋肉を一定の速度で収縮させたときの動的な収縮力を評価する方法である。
図5に実際の人間の生体筋と本人工筋肉の等尺性収縮における評価を示す。このグラフの横軸は筋長(自然長で無次元化している)であり、縦軸はそのとき出力された力である。この図より、若干の違いは生じているものの、筋長が長ければ長いほど大きな力が出力され、自然長で力が最大値となっている点は同様の特性であることが分かる。
次に図6に生体筋の人工筋の等張性収縮の図を示す。横軸は筋肉の収縮速度であり、縦軸は収縮力を示している。(ともに最大値で無次元化している)この図より、筋肉は急に収縮しようとすると力を発生することができず、ゆっくり動かすと大きい力を出すことができる。こちらも、生体筋と人工筋肉は同様の特性を示していることが分かる。
5.さまざまな応用例
人工筋肉は、上記のような優れた性能をもっているので、様々な応用が期待されている。ここでは、本研究室で開発された応用例について見てみよう。
5.1 6自由度人工筋肉マニピュレータ
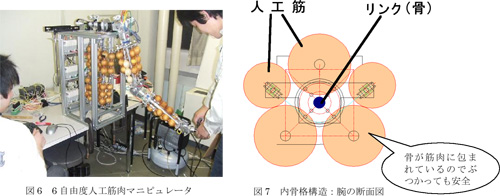
産業用ロボット等は、危険であるため人間と隔離された環境で活動している。将来、介護やリハビリテーション等にロボットを使用することを考えると、軽くて柔らかい、安全なマニピュレータが求められる。図6に示す人工筋肉マニピュレータ(マニピュレータ:腕のようなロボット)は、肩、肘、手首などが人間と同じ関節配置であり、人間とほぼ同様の作業を行うことができる。従来、このような複雑な作業ができるロボットは、関節が硬く、重量も50kg程度と非常に重かった。また、昆虫のように外骨格構造となっているため、硬い構造であり、人間が接触すると怪我をしてしまう恐れがあった。しかしこのマニピュレータは人工筋を用いているため、関節が人間のように柔らかく、重さも2kg程度と非常に軽い。また、人間のように骨の周りに筋肉を配置した内骨格構造(図7)となっているため、人間と接触しても怪我をすることがない。したがって、人間との協調活動に適したマニピュレータであるといえる。動画2![]() に人工筋肉マニピュレータの動いている様子を示す。
に人工筋肉マニピュレータの動いている様子を示す。
5.2 腸管構造を規範とした蠕動運動ポンプ
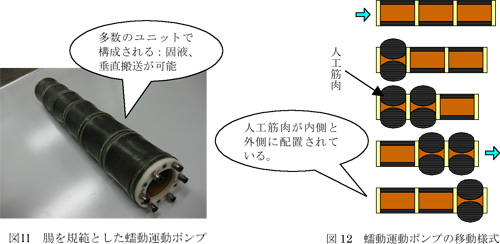
腸は、蠕動運動という運動により人間の食べた食塊を送り出している。この蠕動運動を人工筋肉により発生させることによりポンプのような効果が生じる。図11にポンプの全体図を、図12にポンプに印加する圧力の順序を示す。それぞれのユニットは、人工筋肉の2重構造となっており、外側は軸方向への収縮に寄与し、内側は管の内径の収縮に寄与する。このポンプは、非常に小さい印加圧力で、流体だけでなく、固体や粉体、固液混流体の搬送も可能で、垂直搬送もでき、搬送の省スペース化が実現できる。動画3![]() に蠕動運動ポンプが固液混合流体を搬送している様子を示す。人工筋肉がむにゅむにゅ動いて水を吐き出す様が、生き物のようで気持ちわるい。(余談であるが、著者は、このリアルな気持ち悪さが実現できると、逆にとても快感である。)
に蠕動運動ポンプが固液混合流体を搬送している様子を示す。人工筋肉がむにゅむにゅ動いて水を吐き出す様が、生き物のようで気持ちわるい。(余談であるが、著者は、このリアルな気持ち悪さが実現できると、逆にとても快感である。)
5.3 医療用内視鏡推進装置への応用
図13に、内視鏡搭載型移動機構を示す。この推進装置は、大腸をはじめとした狭小空間を安定的に移動できるミミズの移動様式を規範としている。ミミズは太く短く、細く長くできるような体節からなり、これらの体節を交互に動かすことで移動している(図14)。本研究ではこの体節を人工筋肉に見立て構成することで、ミミズのような移動を実現している。なお、この人工筋肉は中が空洞となっており、ここに既存の内視鏡を挿入することで、腸の中を自走する腸内検査システムが構成される。この動画を動画4![]() に示す。
に示す。

5.4 人工筋肉アクティブワイヤー(超細型人工筋肉)
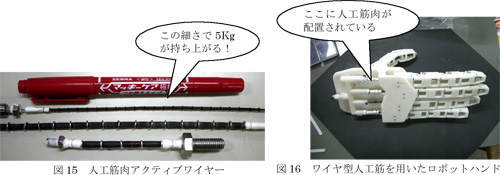
著者らは、この人工筋肉を極限まで細径化することで、引っ張りに強いだけでなく、強い力で自ら収縮するワイヤー「人工筋肉アクティブワイヤー」を開発した。図15に人工筋肉アクティブワイヤーを示す。この図からもわかるとおり、本人工筋は直径0.9mmから3mm程度と非常に細い。このような細さでも人工筋肉としての収縮力が大きく、約50N(5kgf)程度を持ち上げることができる。著者らの研究室では、この人工筋肉をロボットハンドの駆動装置として利用しようとしている。一本の指の中で、ワイヤー自体が収縮することで軽くて力の強いロボットハンドが実現できる(図16)。細型人工筋肉が収縮する動画を動画5![]() に示す。
に示す。
6.他の研究
著者らの研究室では、このような人工筋を用いた研究のほかに、ミミズ、アメンボ、カタツムリ、象の鼻といった生物を規範としたロボットを開発し、医療・宇宙等の極限環境(人間の立ち入ることのできない環境)において活躍できるロボットシステムの構築を目指している。詳しくは下記のHPを参照されたい。
- 中村 太郎(なかむら・たろう)/中央大学理工学部准教授
専門分野 ロボティクス・メカトロニクス、機械システム、知能機械学 - 1975年生まれ。信州大学大学院工学系研究科修了。99年秋田県立大学機械知能システム学科助手、04年中央大学理工学部専任講師を経て06年より同大学助教授、07年准教授、現在に至る。09年日本ロボット学会研究奨励賞受賞。ミミズ・アメンボなどを規範とした生物型ロボティクス、人工筋肉・機能性流体を用いたスマートデバイスの制御とマニピュレータへの応用に関する研究に従事。博士(工学)。日本機械学会、日本ロボット学会、IEEE等の会員。
