

Top>Opinion>Advanced Robotic Developments from Animal Behavior: Robots Taught by Earthworms?
 Index
Index

Taro Nakamura [profile]
Advanced Robotic Developments from Animal Behavior
Robots Taught by Earthworms?
Taro Nakamura
Professor, Faculty of Science and Engineering, Chuo University
Areas of Specialization: Robotics and Mechatronics, Mechanical Systems, Intelligent Mechanics
1. Introduction
In recent years, a variety of products have been put to practical use based on the function or form of animals, such as stain resistant wall tiles inspired by snail shells, and Shinkansen train noses shaped like a platypus snout. This is called biomimetics, and is attracting attention as an innovative technical idea for the next generation of manufacturing.
Looking at the field of robotics and mechatronics, where Japan currently leads the way, one vital role of robots is to perform tasks in extreme environments that people cannot enter (such as inside the human body, in a disaster zone, in space, in the deep sea, etc.) Meanwhile, there are many creatures on earth that have, through a long process of evolution, adapted to a certain form that is ideally suited to their particular environment. With the development of robots that mimic the function of animals living in such extreme environments, we can anticipate the possibility of application in a wide range of fields.
My research team and I have developed robots modeled on the functions of various living creatures including earthworms, water striders, snails, elephant trunks, and others, and studied their application in a range of fields such as space, medical welfare and offshore resource exploration. In this article, I would like to introduce the robots that focus particularly on earthworm movement. (For information on other animal-modeled robots, please see the Nakamura Laboratory website.)
2. Peristaltic motion of earthworms and its characteristics
Have you ever closely examined an earthworm? As a child, I often observed them and saw that, unlike snakes or inchworms, they appeared to move by a series of waves of contractions. In fact these waves of contractions are called peristalsis (Figure 1 and Video 1![]() ). Peristaltic movement is achieved by a longitudinal wave of elongation and contraction that moves in a given direction to propel the subject forward, and is also seen in the human esophagus, intestine and elsewhere. Movement by peristalsis is slow and, at first glance, seems inefficient. However, this method of moving is functionally unique and useful in a way not seen in other motion mechanisms, as it minimizes the space needed to move (Figure 2) while enabling the earthworm to secure a large contact area with its surrounding environment.
). Peristaltic movement is achieved by a longitudinal wave of elongation and contraction that moves in a given direction to propel the subject forward, and is also seen in the human esophagus, intestine and elsewhere. Movement by peristalsis is slow and, at first glance, seems inefficient. However, this method of moving is functionally unique and useful in a way not seen in other motion mechanisms, as it minimizes the space needed to move (Figure 2) while enabling the earthworm to secure a large contact area with its surrounding environment.
Figure 1 Movement pattern of an earthworm
Figure 2 Various different movement patterns
3. Development of robots modeled on earthworms and their application in various fields

Figure 3 Prototype of earthworm robot
First, we made a prototype of a robot that had an earthworm’s peristaltic motion, as shown in Figure 3. Video 2![]() shows the movement of our earthworm-modeled robot prototype. As you can see in the video, this motion mechanism can occur within a pipe and even vertically upward.
shows the movement of our earthworm-modeled robot prototype. As you can see in the video, this motion mechanism can occur within a pipe and even vertically upward.
Active inside the human body – Peristaltic motion robot with large intestine endoscope
Figure 4 shows an earthworm-modeled robot to be used for medical purposes. Based on the peristaltic motion of an earthworm, this robot is fitted with a conventional large intestine endoscope. The unit and its propulsive force utilize the high power straight fibers type artificial muscle, adapted for the human body, which was uniquely developed by our laboratory (https://www.yomiuri.co.jp/adv/chuo/research/20100318.htm). This artificial muscle can be used for the peristaltic motion unit to expand and contract when air pressure is applied. Video 3![]() shows the robot traveling along the inside of a tube.
shows the robot traveling along the inside of a tube.
To date, the robot’s propulsion and passage in short periods of several minutes have been verified in trials using a model large intestine for medical training (Figure 5 and Video 4![]() ) and the isolated large intestine of a pig (Figure 6).
) and the isolated large intestine of a pig (Figure 6).

Figure 4 Endoscope-fitted earthworm robot
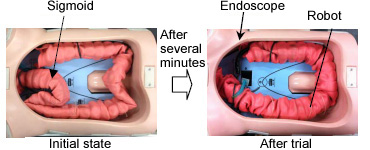
Figure 5 Insertion trial using a model of the inside of a human body

Figure 6 Insertion trial using the isolated large intestine of a pig
Digging on the moon’s surface in the search for underground resources – Burrowing-type lunar/planetary excavation robot development
Burrowing-type robots that can perform underground exploration are required in order to install seismographs on the moon or other planets or to search for resources within the lunar regolith layer. Figure 7 shows an outline of an underground exploratory robot that utilizes peristaltic motion. The aim is to construct a completely new excavation robot that utilizes an earth auger as the propulsion and reaction support mechanisms and adopts the peristaltic motion of an earthworm, enabling it to excavate and carry the regolith away without being unaffected by ground pressure or gravity (Figure 8). Figure 9 and Video 5![]() show a lunar underground exploratory robot boring through soil. The repeated contraction and expansion of these units makes them indifferent to the effect of ground pressure and, in theory, able to continue drilling indefinitely.
show a lunar underground exploratory robot boring through soil. The repeated contraction and expansion of these units makes them indifferent to the effect of ground pressure and, in theory, able to continue drilling indefinitely.
This earthworm-modeled robot is also currently attracting attention as a potential burrowing-type excavation robot for use on Earth in order to search for hidden resources under the deep-sea floor such as rare earth, oil and minerals.
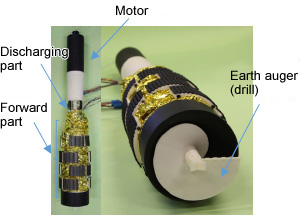
Figure 7 Peristaltic motion-type lunar underground exploratory robot
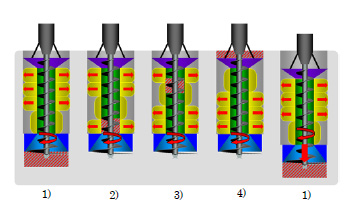
Figure 8 Drilling process of a peristaltic motion robot
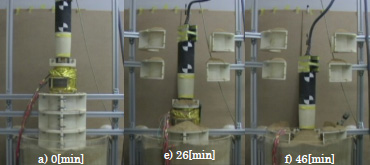
Figure 9 Underground exploratory robot drilling
Narrow pipes pose no problem – Pipe inspection robot development
Industrial endoscopes are often employed to inspect the 25A and 15A piping used for narrow water and gas pipes. But inspections with only an endoscope are difficult because it cannot proceed very far due to the frictional effect inside pipes that have many bends or lengths of 15m or more.
For this reason, there is a need for an endoscope that has a robotic traveling mechanism. No such robot currently exists, however, because of the extreme difficulty a robot with a camera attached would have traveling along a narrow pipe that included numerous elbow joints and so on. For this reason, in our research we have developed a narrow pipe inspection robot with the peristaltic motion of an earthworm that can be mounted with a camera. Figure 10 shows our narrow pipe inspection robot and Figure 11 and Video 6![]() show its passage through consecutive elbow joints. The robot is fitted with a camera inside. As well as passing through the numerous elbow joints of narrow 15A and 25A piping, it can also inspect very long pipes of 15m or more.
show its passage through consecutive elbow joints. The robot is fitted with a camera inside. As well as passing through the numerous elbow joints of narrow 15A and 25A piping, it can also inspect very long pipes of 15m or more.

Figure 10 Peristaltic motion-type inspection robot for narrow pipes
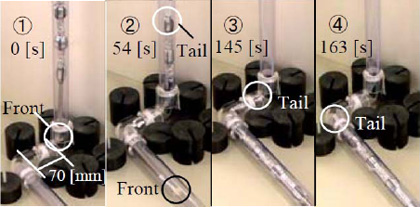
Figure 11 Trial through consecutive elbow joints (25A piping)
Vertical transport by squeezing movement – Pump modeled on large intestinal peristalsis
There is a need at present for devices that carry solid-liquid mixed fluids or high-viscosity fluids in a variety of situations, such as moving mud during natural disasters, treating sewage, carrying foods and sludge in factories, and so on.
We therefore shifted our attention to the peristaltic motion of the intestinal tract. As well as conveying solid-liquid mixed fluid and high-viscosity fluid, the intestine has a variety of other functions such as mixing and separating solids and liquids. In our research, we succeeded in conveying various fluids vertically through the realization of an intestinal-type peristaltic motion using the artificial muscle mentioned above. An example of this is the vertical transport of solid-liquid mixed fluid with a 30% solid content shown in Figure 12 and Video 7![]() . It is anticipated that this pump in future will be applied to mixing and separating solids and liquids and transporting things like sludge, foods, cement, and so on.
. It is anticipated that this pump in future will be applied to mixing and separating solids and liquids and transporting things like sludge, foods, cement, and so on.

Figure 12 Peristaltic pump feeding a solid-liquid mixed fluid vertically upward
4. Conclusion
In this article I have introduced various robots that have adopted the peristaltic motion of earthworms. As mentioned above, in addition to these earthworm robots our laboratory is developing and studying applications for other robots that employ the features of various living creatures, such as robots modeled on the movement of snails that can move in all directions and climb walls, robots modeled on elephant trunks that can wind and bend, robots modeled on water striders that are amphibious for environmental investigation, and so on. For more details, I hope you will visit the website of the Nakamura Laboratory, Faculty of Science and Engineering, Chuo University.
- Taro Nakamura
Professor, Faculty of Science and Engineering, Chuo University
Areas of Specialization: Robotics and Mechatronics, Mechanical Systems, Intelligent Mechanics - The author was born in 1975. He completed the graduate course at the Graduate School of Engineering, Shinshu University. From 1999 he served as assistant professor at Akita Prefectural University. He has served on the Faculty of Science and Engineering, Chuo University as lecturer from 2004, associate professor from 2006, and professor since 2013. From 2012 to 2013 he was a visiting professor at the Swiss Federal Institute of Technology in Lausanne. He holds a Ph.D. in engineering.
He is engaged in the development and control of smart actuators such as artificial muscle and functional fluids, and the development and application of biorobotics modeled on living creatures.
He has received awards such as the 2009 Young Investigation Excellence Award from the Robotics Society of Japan, the 2010 Young Engineers Award from the Japan Society of Mechanical Engineers, the 2011 Young Scientists’ Prize from the Ministry of Education, Culture, Science and Technology. His recent work includes Artificial Muscle – A Graphic Representation [Zukai – Jinko Kinniku] and others. - Nakamura Lab, Chuo University


- Research Activities as a Member of Research Fellowship for Young Scientists (DC1), Japan Society for the Promotion of Science (JSPS) Shuma Tsurumi
- Important Factors for Innovation in Payment Services Nobuhiko Sugiura
- Beyond the Concepts of Fellow Citizens and Foreigners— To Achieve SDGs Goal 10 “Reduce Inequality Within and Among Countries” Rika Lee
- Diary of Struggles in Cambodia Fumie Fukuoka
- How Can We Measure Learning Ability?
—Analysis of a Competency Self-Assessment Questionnaire— Yu Saito / Yoko Neha - The Making of the Movie Kirakira Megane