

Top>Research>Development of High Power Artificial Muscle and Application to Robot
 Index
Index

Taro Nakamura [Profile]
Education course
Development of High Power Artificial Muscle and Application to Robot
Taro Nakamura
Associate Professor of Robotics & Mechatronics, Mechanical Systems, Smart Machines, Faculty of Science and Engineering, Chuo University
My laboratory develops actuators which are as flexible as human muscles and possesses outstanding attributes. These actuators serve as technology required for systems such as nursing care robots, rehabilitation systems, power assist, and other systems in which humans and robots cooperate in order to perform an activity. In this article, I would like to explain the world-class high power artificial rubber muscle developed by My laboratory, as well as the application of this technology to robotics.
1. What is artificial rubber muscle?
Pneumatic artificial rubber muscle (hereafter referred to as “artificial muscle”) is a type of actuator that obtains power by injecting a fluid substance such as air into an elastic medium such as rubber. This technology can be easily understood by imagining an actuator consisting of balloon-like material made by combining rubber and fibers. When air pressure is applied within that balloon-like material, contractile force occurs in a certion direction. This kind of actuator possesses the following characteristics when compared with actuators using conventional motors and oil/air pressure devices.
- Lightweight with a high power density (great power is exerted despite being lightweight)
- Can be used in any environment, even underwater. For example, use is possible underwater.
- Maintenance is simple because no sliding components exist.
- Possesses flexibility and possesses attributes similar to those of human muscles.
- Inexpensive material costs.
Therefore, not only is focus placed on this actuator for use as a direct actuator in factories, but the actuator is also attracting attention for its suitability in mechanical systems which often directly contact human beings. Examples of such systems include rehabilitation devices and wearable power assists devices.
McKibben artificial muscle can be raised as an example of pneumatic artificial rubber muscle that is currently used widely in academic and industrial circles. This artificial muscle was developed by Mr. Joseph McKibben in 1961 and was initially used as an actuator for rehabilitation. Currently, McKibben artificial muscle has become so commonplace that any discussion of pneumatic artificial muscle immediately brings to remind the McKibben type. However, the contraction rate of McKibben artificial muscle is only about 20% and the ability to generate force is also small. Furthermore, this type of artificial muscle also has the drawback of a short lifespan due to frictional wearing of the rubber caused by grazing of the rubber tube and sleeve.
In order to overcome such drawbacks, my laboratory is developing straight fibers type artificial muscle with high power output and a long lifespan. In this article, I shall explain the usefulness of My laboratory’s artificial muscle through a detailed discussion regarding the structure of the developed artificial muscle, as well as through comparison with McKibben artificial muscle. I shall also introduce devices which have been developed by applying our artificial muscle. Such devices include a 6-DOF (degree of freedom) artificial muscle manipulator, a Propulsion mechanism for medical endoscopes, a peristalsis pump, and artificial muscle layers.
2. Straight Fibers Type Artificial Muscle
Figures 1 and 2 show the structure and contraction mechanism for the developed straight fibers type artificial muscle (hereafter referred to as “high power artificial muscle”). Normally, when supplying air pressure to rubber shaped like a hollow cylinder with no fiber bonding, the rubber will expand in both the certion direction and the radial direction, similar to a balloon. Therefore, it is impossible to obtain direct contraction (Figure 1). However, when air pressure is supplied to fibers that are bonded in the certion direction as shown in Figure 2, the rubber expands only in the radial direction without expansion in the certion direction. The length of the fibers is not stretched during this expansion, and it is therefore possible to obtain contractile force in the certion direction. This method makes it possible to directly transmit the fluid pressure as the contractile force of the actuator. Furthermore, frictional wear between the bonded fibers and the elastic medium is avoided by encapsulating the reinforced fibers within the rubber tube of the artificial muscle. Additionally, it is possible for the fibers to withstand great pressure by positioning fine micro-level fibers in stratifications instead of using fibers which are twisted like string. The use of stratified fibers also results in a long lifespan. Video 1![]() shows the contracting of artificial muscle. In this video, the contraction is purposely performed slowly in order to make the contraction easy to see.
shows the contracting of artificial muscle. In this video, the contraction is purposely performed slowly in order to make the contraction easy to see.
3. What is the extent of differences with conventional artificial muscle?
3. 1 Pressure/Contraction Rate Attributes
My laboratory performed an experimental comparison of pressure/contraction rate attributes for cases in which the thickness, width, length and shape of each type of artificial muscle had been made uniform. Figure 3 shows the pressure/contraction rate relationship as the relationship between contraction rates when pressure is applied to artificial muscle. For comparisons using the same pressure, the figure shows that high power straight fibers type artificial muscle has a higher contraction rate than McKibben artificial muscle. Furthermore, while the maximum contraction rate of McKibben artificial muscle is only 25%, the maximum contraction rate for straight fibers type artificial muscle approaches 40%. The resistance to pressure of the fiber-reinforced artificial muscle is also vastly superior to the McKibben type. At the present moment, the contraction rate of the fiber-reinforced artificial muscle is the highest level in the world.
3. 2 Pressure/Contractile Force Attributes
Next, under the same conditions, My laboratory performed an experimental comparison of pressure/contractile force attributes. Figure 4 shows the relationship between applied pressure and contractile force. For comparisons using the same pressure, the figure shows that high power straight fibers type artificial muscle has contractile force that is more than 5 times stronger than McKibben artificial muscle. Also, when conducting comparison at maximum pressure, it can be seen that the artificial muscle developed by My laboratory outputs a force of approximately 1000N (100 Kgf) despite an approximate weight of merely 50 grams. This is more than 8 times the force outputted by McKibben artificial muscle. Currently, this contractile force is also the highest level of output in the world.
4. Biological comparison of high power artificial muscle and human muscle
Next, I will compare how close this artificial muscle is to the actual biological muscle of human beings. Isometric contraction and isotonic contraction are the main methods for evaluating actual biological human muscle. Isometric contraction is a static evaluation method which measures the amount of force that can be generated when muscles are kept at a certain length. Isotonic contraction is a method for evaluating moving contractile force when muscles are contracted at a certain speed.
Figure 5 shows an evaluation of isometric contraction for actual biological human muscle and for this artificial muscle. The horizontal axis of the graph represents muscle length (non-dimensionalized at natural length) and the vertical axis represents the force output at that time. Although small differences can be observed, the figure shows similar attributes for both types of muscle in terms of an increase in output force as the muscle length becomes longer and in terms of force reaching a maximum value at the natural length.
Next, Figure 6 shows the isotonic contraction of biological muscle and artificial muscle. The horizontal axis represents the contraction speed of muscle and the vertical axis represents the contractile force. (Both factors are non-dimensionalized at maximum value.) This graph shows that muscle is unable to exert force when attempting to contract suddenly, but is able to exert great force when moving slowly. In this respect, the graph shows that both biological muscle and artificial muscle have the same attributes.
5. Various Application Examples
Artificial muscle possesses the outstanding attributes described above and is therefore expected to have a variety of applications. In this section, I will discuss examples of the applications developed by My laboratory.
5.1 6-DOF (degree of freedom) Artificial Muscle Manipulator
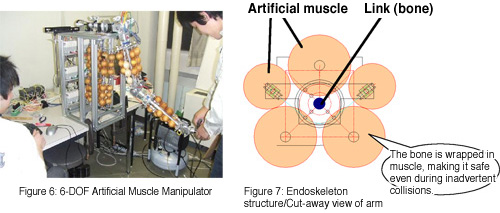
Devices such as industrial robots are dangerous and therefore are operated in environments which are separated from human beings. When considering the future use of robots for tasks such as nursing care and rehabilitation, lightweight, flexible and safe manipulators have been required. The artificial muscle manipulator (manipulator: an arm-like robot) shown in Figure 6 has the same joint positioning as a human being, with components such as a shoulder, elbow, and wrist. The manipulator is capable of performing almost the exact same operations as a human being. Until now, robots capable of performing these kinds of complicated operations had stiff joints and were extremely heavy, with a weigh of approximately 50 kilograms. Furthermore, such robots had an insect-like exoskeleton structure which was very hard, and there was the danger of injury when human beings came into contact with the robot. However, the use of artificial muscle in this manipulator makes the joints soft like those of human beings and reduces the weight to an extremely light 2 kilograms. Additionally, the manipulator has a human-like endoskeleton structure (Figure 7) in which muscles are positioned around the bones. This means that there is no danger of injury when contact is made with a human being. Therefore, it can be said that this manipulator is appropriate for activities performed in cooperation with human beings. Video 2![]() shows the movements of an artificial muscle manipulator.
shows the movements of an artificial muscle manipulator.
5.2 peristalsis pump modeled on an enteric structure
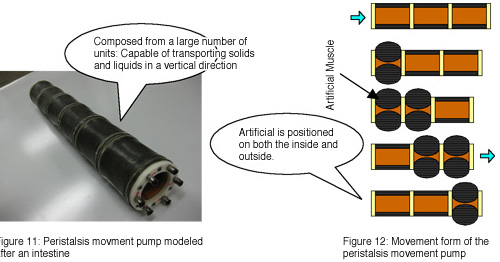
The intestines use a movement known as peristalsis movement to transport the alimentary bolus eaten by human beings. By using artificial muscle to generate this peristalsis movement, an effect similar to a pump is created. Figure 11 shows an overall diagram of the pump and Figure 12 shows the order of pressure applied to the pump. Each of the units uses a 2-layered structure of artificial muscle. The outer layer contributes to contraction in the certion direction and the inner layer contributes to contraction of the pipe diameter. With only an extremely small amount of applied pressure, this pump is able to transport not only fluids, but also solids, powders, and solid-liquid mixtures. The pump is also capable of vertical transportation and of reducing the amount of space required for transportation. Video 3![]() shows a solid-liquid mixture being transported by a peristalsis pump. The sight of artificial muscle pulsating and emitting water seems like a living organism and is even somewhat repulsive. (On a side note, I actually feel great pleasure when I am able to replicate this kind of real repulsive movement!)
shows a solid-liquid mixture being transported by a peristalsis pump. The sight of artificial muscle pulsating and emitting water seems like a living organism and is even somewhat repulsive. (On a side note, I actually feel great pleasure when I am able to replicate this kind of real repulsive movement!)
5.3 Application to the Propulsion mechanism of medical endoscopes
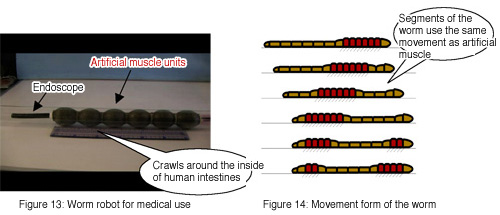
Figure 13 shows a movement mechanism which is attached to in the endoscope. This Propulsion mechanism is modeled after the movement form of a earthworm that is capable of stable movement through narrow spaces such as the large intestine. The earthworm is composed of body segments which are capable of becoming thick and short or thin and long. The earthworm moves by alternately moving these segments (Figure 14). In this research, I have realized earth locomotion based on the movement of an earthworm through a structure which uses artificial muscle for these segments. Furthermore, the inside of the artificial muscle is hollow and an existing endoscope can be inserted into the cavity. This composes an intra-intestinal system which is capable of independent movement through the inside of intestines. A film of this movement is shown in Video 4![]() .
.
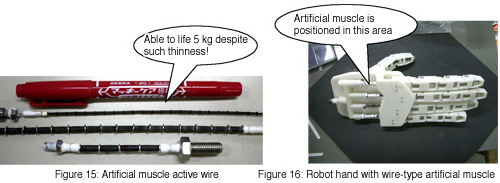
5.4 Artificial muscle active wire (extremely fine artificial muscle)
My colleagues and I made the diameter of this artificial muscle as thin as possible. By doing so, we were able to develop wire (artificial muscle active wire) which not only withstands pulling but also independently contracts with great force. Artificial muscle active wire is shown in Figure 15. As seen in the figure, this artificial muscle has an extremely fine diameter of 0.9 mm to 3 mm. Despite such thinness, the artificial muscle possesses grate contractile force and is capable of lifting approximately 50N (5 Kgf). My laboratory is attempting to use this artificial muscle as the drive mechanism for a robot hand. It is possible to realize a lightweight yet strong robot hand by having the wire contract within each individual finger (Figure 16). Video 5![]() shows the contraction of fine artificial muscle.
shows the contraction of fine artificial muscle.
6. Other research
In addition to research using this kind of artificial muscle, My laboratory is working to develop robots modeled after living creatures such as earthworms, water striders, snails, and even the Elephant's Trunk. My laboratory strives to construct robot systems capable of performing in extreme environments such as medicine and space exploration (environments which cannot be entered and acted by human beings). Please view the homepage listed below for further details.
- Taro Nakamura
Associate Professor of Robotics & Mechatronics, Mechanical Systems, Smart Machines, Faculty of Science and Engineering, Chuo University - Born in 1975. Completed the graduate course at the Graduate School of Engineering, Shinshu University. Served as Assistant professor at the Department of Machine Intelligence and System Engineering, Akita Prefectural University from 1999. Assumed the position of lecturer at the Faculty of Science and Engineering, Chuo University from 2004. Became Associate Professor of Chuo University from 2006. Won the 2009 Research Incentive Prize from the Robotics Society of Japan. Engaged in research regarding biological robots based on various creatures such as earthworms and water striders, research related to the control of smart devices using artificial muscle and smart fluids, and research related to application to manipulators. Holds a Ph.D. in engineering. Member of associations such as the Japan Society of Mechanical Engineers, the Robotics Society of Japan, and the IEEE.

- Research Activities as a Member of Research Fellowship for Young Scientists (DC1), Japan Society for the Promotion of Science (JSPS) Shuma Tsurumi
- Important Factors for Innovation in Payment Services Nobuhiko Sugiura
- Beyond the Concepts of Fellow Citizens and Foreigners— To Achieve SDGs Goal 10 “Reduce Inequality Within and Among Countries” Rika Lee
- Diary of Struggles in Cambodia Fumie Fukuoka
- How Can We Measure Learning Ability?
—Analysis of a Competency Self-Assessment Questionnaire— Yu Saito / Yoko Neha - The Making of the Movie Kirakira Megane