


トップ>研究>宇宙探査を目指す生物型ロボットの開発―ミミズ型ロボットが月へ行く!?―
 一覧
一覧

中村 太郎【略歴】
宇宙探査を目指す生物型ロボットの開発
―ミミズ型ロボットが月へ行く!?―
中村 太郎/中央大学理工学部教授
専門分野 ロボティクス・メカトロニクス、機械システム、知能機械学
1.はじめに
現在、著者らの研究室では、ミミズやアメンボ、カタツムリ、フナ虫などの生物を模倣して、医療・宇宙・資源探査・超細管内等の極限環境で活躍できるようなロボットを開発している![]() 。今回はこの中で、ミミズとフナ虫を模倣したロボットがJAXAの「宇宙探査イノベーションハブ
。今回はこの中で、ミミズとフナ虫を模倣したロボットがJAXAの「宇宙探査イノベーションハブ![]() 」のアイディア型に採択された。
」のアイディア型に採択された。
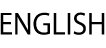
本テーマは、ミミズやフナ虫の動きを模倣した小型探査ロボットを、宇宙空間における惑星や月の地表面・地中などに複数分散させて、これらが移動することによって互いに連携しながら情報収集・環境計測できるような探査システムの実現を目指している(図1)。本研究はJAXAと連携を密にしながら、これらのロボットを開発し、月・惑星上の未踏峰地点について広範囲で密度の濃い探査を行うことを目指す。
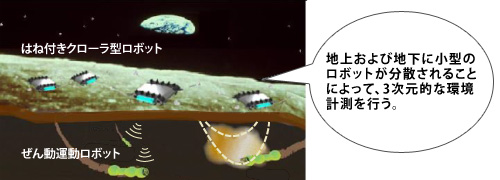
図1 月・惑星探査システムの概要
またこれらのロボット技術は宇宙探査の目的のみにとどまらず、上述のように配管検査、地盤調査、海底の資源探査や災害地等、地球上における様々な極限環境での情報収取やメンテナンスにも役立つと考えている。
本稿では、地面を潜りながら地中を探査する地中埋没型ぜん動運動ロボット(ミミズ型ロボット)と高速で地表面を広域に探査するはね付きクローラ型移動ロボット(フナ虫型ロボット)をそれぞれ紹介する。
また最後に大腸型ポンプを使った固体ロケット用推進剤製造装置など、そのほかの本研究室とJAXAとの共同開発プロジェクトについても簡単に紹介する。
2.地中埋没型ぜん動運動ロボット(ミミズ型ロボット)
現在、月や惑星への地震計の設置やレゴリス(月の砂)層中の地下資源の探索・地中にある水の探索のために、月・惑星の地中探査ができる埋没型ロボットが求められている。本研究はこの要求に対して、ミミズのぜん動運動という動きを利用して掘削することに挑戦している。
2.1 ミミズの動きとその特徴
かつて「サンダーバード」という特撮番組で「ジェットモグラタンク」という地中埋没型の車両が登場していた。この掘削機構は「本体が土台から切り離されたとたん掘削トルクを支持する機構がないので本体が回転してしまう・・・」など駆動メカニズムには若干疑問符が付くが、地中を潜って掘削していくというアイディアには大きな衝撃を受けた。
翻って、ミミズもモグラと同様に土の中を潜っていく生物である。ミミズはこの土中において、ぜん動運動という移動手法により移動している。ぜん動運動とは人間の食道や腸などにも見られる運動で、縦波の伸縮波を一定方向に進行させることによって、対象物を移動させることができる運動である。ぜん動運動による移動は速度が遅く、一見効率の悪い運動のように見えるが、他の移動機構には見られない独創的かつ有用な機能を持っている。本運動の特徴を以下に示す。
① 移動に必要な空間が最も小さい。
② 周辺環境に対して接地面積を大きく確保することができる。
③ 内部が食道になっており、空洞になっている。
上記の特徴を工業的に解釈すると、①は地中内移動や細管移動に適している。②は牽引力や押しつけ力が大きく、長距離移動や掘削の押しつけに有効である。③はロボット内部に掘削デバイスやカメラ等の設置が容易。となり、工業的に有用な移動手段を持った生物であることがわかる。
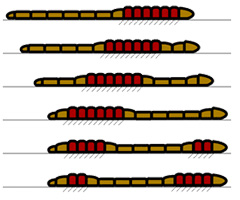
図2 ミミズの蠕動運動
ミミズがぜん動運動により前進する様子を図2に示す。ミミズは約150の体節から成り立っており、この体節を「細く長く」「太く短く」することができる。ミミズははじめに頭部の体節を収縮させ、この収縮を順に後方の体節へと伝播させながら頭部の体節を伸長させてゆく。このとき収縮した体節と地面との間に摩擦が発生し、伸長した体節が前方に伸びるための反力を得ることがでる。この収縮と伸長の繰り返しによりミミズは前進することができる。
2.2 ミミズロボットの掘削するメカニズム
図3 ミミズロボットの掘削
月などの小天体の地中を掘削するときには、アースオーガ(ドリル)による掘削反力の確実な支持と掘削する際の押しつけ力に対して土圧(水圧のようなもの)や重力の影響を小さくすることが必要となる。少なくともこれらの条件を満たさないとロボットは掘削途中でドリルが空転(もしくは本体が回転)して掘進しなくなる。しかし、ミミズによる移動方法はこの条件を実に巧妙にクリヤすることができる。
ではこのミミズロボットがどのように地中を掘削していくのか説明する。図3に土中を掘削しているロボットの概念図を示す。本ロボットは、土の掘削・運搬にはアースオーガを、推進・反力支持機構にミミズのぜん動運動を用いている。推進部の一部が「太く短く」なるとロボットは掘削壁面を押し付け、その摩擦力によって、アースオーガの回転と掘削面への押し付けの反力を支持する。さらに「細く長く」なることによって、重力に関係なくアースオーガの押し付け力が得られるとともに、壁面との摩擦が小さくなるため、月のような低重力下でも土圧に関係なくどこまでも深く掘り進めることができる。
最後に図4(動画1)に実際にミミズ型ロボットが掘削している様子を示す。現在この掘削半径のクラスでは世界最高深度の役1m程度の掘削に成功(土槽の底まで掘り切ったため掘削を中止)した。現在埋没型ロボットの特徴を生かして、屈曲掘削したのち、水平方向の広い範囲の掘削・検査ができるような新しい機構の開発を行っている。
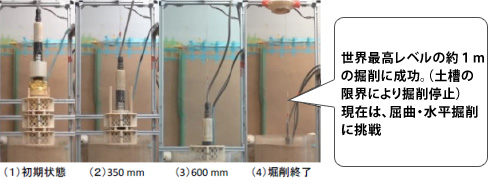
図4 ぜん動運動型ロボットの掘削の様子(動画1)
3.はね付きクローラ型移動ロボット(フナ虫型ロボット)
3.1 はね付きクローラ型移動ロボットとは?
図5にはね付きクローラ型の移動ロボットを示す。本研究は、著者の研究室に所属している山田泰之助教によって提案されている不整地用の小型高速移動ロボットである。
現在開発されている不整地用ロボットは、不整地走破性を向上させるために、移動速度が低下する場合が多かった。しかしながら情報収集や作業を行う不整地移動ロボットの移動機構には、不整地における走破性だけでなく移動速度や機構のシンプルさなどが要求される。
そこで、不整地走破性と移動速度を両立する全く新しい移動機構として、フナ虫やムカデ等の多足歩行を行う生物の歩行を規範としたはね付きクローラを開発した。このはね付クローラは、図6のようにクローラベルトに受動的に屈曲するラグを取付けることで、低速時には図6(a)のように通常のクローラと同様に広い接地面を確保して走行し、高速走行時にはラグが図6(b)のように開いてホイール径が疑似的に拡大して、地面の凹凸の影響を受けにくくなり、不整地走破性能が向上する。それぞれが脚のような働きを行うことで、ロボットと地表間に空間が作られて疑似的なサスペンション機能を発揮する。

図5 はね付きクローラ型の移動ロボット(動画2)
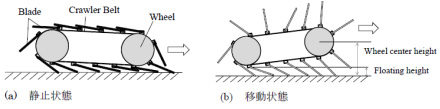
図6 はね付きクローラの仕組み
3.2 地上での応用技術と今後の課題
これまで、提案機構を搭載した不整地移動ロボットを作製して運用想定したフィールド試験を伊豆大島裏砂漠等で繰り返し、その走破性能と移動性能の定性的に評価した。その結果、移動速度が類似サイズの多足歩行模擬の不整地移動ロボットで世界トップクラスの10km/hを達成した。(動画2)
本プロジェクトでは、このはね付きクローラ型移動ロボットをさらに小型化し、伊豆半島のような火山地域に類似した環境であると想定される月や惑星の表面を探査させることを考えている。このロボットを多数用いることにより、従来の大型ローバーとは全く違った観点から、革新的な探査システムを確立することを目標としている。
4.その他のJAXAとの協力関係
現在、著者らの研究室(本学理工学部精密機械工学科バイオメカトロニクス研究室)では、上記プロジェクトの他に、経産省-JAXAの「宇宙産業技術情報基盤整備研究開発事業」の一環として、腸管構造を規範としたぜん動ポンプ![]() を用いた固体ロケット用推進剤の製造装置の開発に関するプロジェクト
を用いた固体ロケット用推進剤の製造装置の開発に関するプロジェクト![]() に携わっている。詳細は割愛するが、このプロジェクトは今までの固体ロケットの問題点を極めて独創的に解決する手段であり、世界の固体ロケットの常識を変えるかもしれない大きなイノベーションを起こす技術になると期待されている。
に携わっている。詳細は割愛するが、このプロジェクトは今までの固体ロケットの問題点を極めて独創的に解決する手段であり、世界の固体ロケットの常識を変えるかもしれない大きなイノベーションを起こす技術になると期待されている。
5.まとめ
ミミズやフナ虫を規範とした月・惑星探査の移動ロボットの開発について述べた。近い将来これらのロボットが宇宙で活躍できるよう研究室の学生・院生とともにプロジェクトを加速させていきたいと考えている。
- 中村 太郎(なかむら・たろう)/中央大学理工学部教授
専門分野 ロボティクス・メカトロニクス、機械システム、知能機械学 - 1975年生まれ。信州大学大学院工学系研究科博士後期課程修了。1999年、秋田県立大学助手。2004年、中央大学理工学部専任講師、2006年、同大学准教授をへて、2013年より同大学教授。現在に至る。2012−2013年までスイス連邦工科大学ローザンヌ校Visiting Professor. 博士(工学)。人工筋肉や機能性流体等のスマートアクチュエータの開発と制御、および生物を規範としたバイオロボティクスの開発と応用に従事。2009年、日本ロボット学会研究奨励賞、2010年、日本機械学会研究奨励賞、2011年、文部科学大臣表彰若手科学者賞などを受賞。近著に「図解 人工筋肉」等がある。
- 中央大学バイオメカトロニクス研究室

