


トップ>オピニオン>人とロボットの共生 ~ロボット用の地図とは? 人の移動履歴の表現とその応用~
 一覧
一覧

新妻 実保子 【略歴】
人とロボットの共生
~ロボット用の地図とは? 人の移動履歴の表現とその応用~
新妻 実保子/中央大学理工学部准教授
専門分野 人とロボットのインタラクティブコミュニケーション、空間知能化、ヒューマン・インタフェース
はじめに
2011年秋に初めてChuoOnlineに寄稿させて頂いてから、3年とちょっとが経ちました。そのときは「人とロボットの共生~空間知能化と動物行動学に基づくアプローチ~」というタイトルで研究の概要を紹介しました[1]。今回は、人とロボットの共生に向けた取り組みとしてもう少し具体的な例を紹介したいと思います。ロボットが人の生活する日常的な環境内で安全にそして効率的に動作するためには、わたしたち人間が普段無意識のうちにしているような空間の観測をロボットも行う必要があります。
たとえば、前回の記事でも参照した教室を例にしてみましょう。

人が教室へ入って黒板に向かおうとしたら、どこに通路があるかを見つけ、そして通路を通って黒板へ向かいます。もしこのとき、通路の向こうから誰かが同じ通路を通ろうとしたら、別の通路を選ぶかもしれませんし、通路のこちら側で人が通り過ぎるのを待つかもしれません。ここで人がとても賢いなぁと思うのは、状況次第で取りうる行動が変わるという点です。人は経験的に、通路の反対側にいる人は同じ通路を通るかもしれないことを知っています。いくつかの可能性を予測した上で、次の行動を計画できます。
これをロボットでも行うようにするにはどうすればよいか、その方策の一例を今回は紹介したいと思います。
ロボット用の地図をつくる
人も初めて行った場所では何の情報もなしに目的地まで移動しようとしても、よほど勘のよい人でなければ道に迷います。そもそも自分がどこにいるかも分からず、もちろん目的地がどこにあるかも分かりません。そんなときに使うものが地図です。地図は自分がどこにいるのかを知るためにも使えますし、どこに道があるのかを知るためにも使います。普段地図を見るときには後者の使い方はあまり意識しないかもしれませんが、自分たちが移動できる場所と移動できない場所を知ることは実は重要です。自分のいる場所から目的地までを一直線には移動できないことの方が多いので。
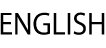
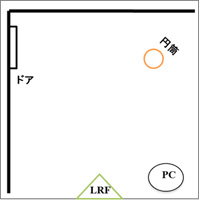
ロボットにも同じように環境を知るための地図があります。地図を用いる目的は人と同じで、自分の場所を知り、自分が移動できる場所を知るためです。ロボットが読める形で表されているという違いはあります(注1) 。そして、人は室内を移動するときに地図を利用することはほとんどないと思いますが、ロボットは上の2つの目的のためにいつでもどこでも地図を必要とします(地図なしで行動させるような場合もありますが)。屋内空間の地図を作成した一例を示します。図1(b)の青く塗りつぶされた箇所は物があることを示し、ロボットは侵入できない領域であることを記しています。ドア付近には角があり、円筒の位置にはその外形が見られます。このような地図の特徴からロボットは自分がどこにいるかを推定したりします。
- 図1 ロボット用の地図
-
(a) 参照した屋内環境(LRFは測域センサを示し、このセンサで地図を作るためのデータを取得しています)
(b) 作成した環境地図(空間を均等な小領域で分割して、各領域における障害物の占有度を表した形式の地図で、グリッドマップと呼ばれます)
ロボット用の地図に人の移動履歴を書き込む
上の地図でその空間のどこに通路がありそうか、ロボットは知ることができるようになります。では、最初の課題に戻って、「通路の向こうから誰かが同じ通路を通ろうとしたら」という状況をロボットがどのように把握するかということを考えてみましょう。この状況をこのように解釈するには、実は2つの情報が必要になります。一つは「通路の向こうに誰かがいる」ということを知ること、もう一つは「同じ通路を通ろうとしている」ということを知ることです。
前者の情報は地図をつくるときにセンサを使って物体の位置を測ったのと同じように測ることができます。ただ後者は「そこに通路(になりうる場所)がある」ということを知り、その上で「(どの程度の頻度で)人はそこを通るのか」ということを知らなければ推測することはできません。すなわち、「人がそこにいる」ということだけでは後者を推測することはできないということになります。
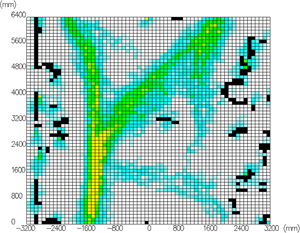
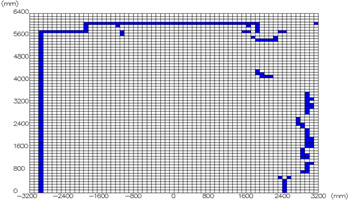
図2 人の移動頻度を表したグリッドマップ(黒色の領域はロボットが侵入できない領域(障害物のある領域)を表し、水色から黄色に変化する色は各領域における人の移動履歴を表し、白色の領域は障害物も移動履歴もない場所を示しています)
そこでわたしたちは、人の通り道になるような場所とその頻度を地図に書き込むことを考えました[2]。図2にその一例を示します。この図は人の移動頻度と移動速度に応じて人の移動という活動をグリッドマップに表したものです。黄色の領域ほど多くの移動履歴があったことを示しています。ロボットもこの地図を参照すれば、たとえば黄色の領域に人がいたと見つけたとき、その人がどのような方向に進む可能性があるか、推測することができるようになります。教室のように通路が限定された環境では人の移動も限定されるので推測も簡単そうですが、図2の例のように、どんな方向にも移動できそうオープンな空間でも人の移動を推測できるところに特徴があります。
人の移動履歴を書き込んだロボット用地図の応用
では、人がどのように移動しうるかを知ることができるロボット用地図を使って、具体的にロボットはどんなことができるでしょうか。いくつか研究例を紹介したいと思います。
一つは、この移動履歴を活用したロボットの移動経路の計画です。
- 図3 移動履歴とロボットの移動経路(緑色の領域が人の移動履歴を示し、黒色の点がロボットの移動軌跡を示します)
-
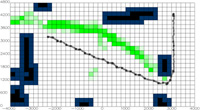
(a) 緑色の人の通路を完全に避けるような経路を移動することもできます。
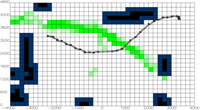
(b) 通路の向こうから来る人を適度に避けながら、効率的に移動してみましょう。
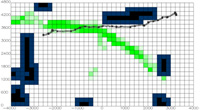
(c) 人が来なければ、そのまま最短距離を移動することも。
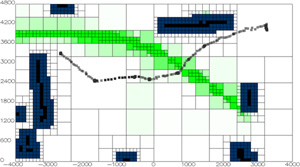
図4 移動履歴に基づくマルチレゾリューションのグリッドマップ
さらに、図3を見てみると、人の移動履歴のある場所と人も使わなければ物もないような場所とが混在していることが分かります。そこで、人の移動履歴に応じて、地図の領域分割の大きさを変えてみました[3]。このようにすると、人がよく通るところではロボットも細かく移動することができ、人が通らないところは大雑把に経路を計画して移動することができます。使われない領域が広ければ、地図を構成するマスの数が減るので経路を見つけるのも簡単になります。
最後に少し異なる応用例として、人がよく立ち止まるところに注目してつくったロボット用の地図を紹介します。前の移動履歴は早く移動する場所ほど移動という活動の度合が高いとして地図に書き込んでいました。今度は、速度が遅くなる場所、あるいは人がよく止まるところほど人が活動している可能性が高い場所として地図に表したものです。
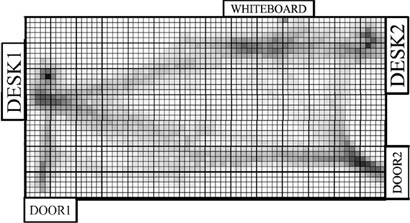
図5 人がよく立ち止まるところを表したロボット用の地図 [4]
少し話しは変わりますが、わたしたちは、移動したい方向を指示するだけで目的地まで移動する電動車いすのロボット化についても研究しています。人からの方向指示と図3、4で示した経路計画を組み合わせて、電動車いすに経路を追従させて移動するものです(なんとなくイメージできますか?)ただ問題は、行きたい場所の方向を正確に指示できるか、ということです。手が震えればある方向を正確に指示するのは難しく、あるいは手ではなく視線で方向を指示できたとしても、ある方向を一直線に示すのは難しいといえます。そんなときこの地図(図5)があれば、人がよく立ち止まるところ、あるいは活動領域としてよく使用するところを見つけることができ、大雑把な方向指示から電動車いすの目的地として適切そうな場所を推定することができるようになる、という応用例でした。
今回は、人の移動履歴・活動履歴をロボット用の地図に表すことにより、状況次第で行動を変える、その場の状況に適した行動を選択可能にするということを目指した研究を紹介しました。人とロボットが違和感なく共生できるような環境づくり、ロボットの行動づくりを続けて行きたいと思います。
- 新妻 実保子(にいつま・みほこ)/中央大学理工学部准教授
専門分野 人とロボットのインタラクティブコミュニケーション、空間知能化、ヒューマン・インタフェース - 福島県いわき市出身。1979年生まれ。
2007年東京大学大学院工学系研究科博士課程修了
博士(工学)
東京大学生産技術研究所博士研究員、中央大学理工学部精密機械工学科助教を経て2013年4月より現職
現在の研究課題は、 ロボティクスによる人の活動支援を目的とした人とロボットのコミュニケーション(犬の愛着行動のロボットへの適用、協調型電動車いす)、ヒューマン・インタフェース(音高差を用いた壁面形状の提示、産業用ロボットの遠隔操作支援など)
http://www.mech.chuo-u.ac.jp/~hslab/
