


トップ>研究>人とロボットの共生~空間知能化と動物行動学に基づくアプローチ~
 一覧
一覧

新妻 実保子 【略歴】
教養講座
人とロボットの共生
~空間知能化と動物行動学に基づくアプローチ~
新妻 実保子/中央大学理工学部助教
専門分野 ヒューマン・インタフェース、空間知能化、人とロボットのインタラクティブコミュニケーション
はじめに
筆者はヒューマン・システム研究室(理工学部・精密機械工学科)にて、人とロボットが共生するための仕組みについて研究を進めている。まず、人が生活するような環境でロボットが活動するためには、様々な困難がある。たとえば、人は自分が空間内のどこにいるか特に意識せずとも知ることができるが、ロボットに同じことを行わせることは難しい。そこで、ロボットが日常空間で移動したり、人がどこにいるかを見つけたりする機能を実現するアプローチとして空間知能化を紹介する。次に、仮にロボットが自在に日常空間を移動できるようになったとしても、ロボットは人からのメッセージや指令を受け取ることができなければ、反応することもできない。また人へ何かを伝えるにも、人が理解できるかたちで提示しなければ人へは伝わらない。情報やメッセージのやりとりをコミュニケーションと呼ぶと、人とロボットのコミュニケーションを実現する方法として動物行動学における知見を応用した方法を紹介する。
人とロボットの共生を実現するプラットフォームとしての空間知能化
ロボットが人の生活する環境で活動するためには、人と同じように周辺環境を知る必要がある。たとえば、学校の教室を考えてみる。教室には出入り口があり、壁に黒板やスクリーンがあり、机がたくさん並べてある。人が教室へ入って黒板に向かおうとした場合、どこに通路があるかを見つけ、そして通路を通って黒板へ向かうだろう。では、ロボットではどうか。ロボットも空間を飛べるロボットでない限り、通路を見つけて机にぶつからないようにして進まなければ黒板へ到達できない。これを実現するために、ロボットには周辺の物体までの距離を測ることができるセンサが必要となる。センサを用いて物体までの距離を測ることによって、走行できる領域を見つけて机に衝突しないように走行できる。

ではここで、このロボットが人の後を追って物を運ぶ仕事を行うロボットだとしたらどうだろうか。ロボットは周辺環境の障害物だけでなく、移動する人を見失うことなく捉え続ける必要がある。もし他にも人がたくさんいる環境であるなら、支援する対象の人と、それ以外の人を見分けて人と障害物を避けながら、対象となる人の後を追わなくてはならない。このように、人が簡単に行っていることもロボットが行うには多くのことを考えなければならない。
ロボットが実空間で移動することが困難である理由のひとつは、人の生活する空間は人のために用意された空間であり、必ずしもロボットにとって活動しやすい場所ではないということである。もう一つは、ロボットに搭載できるセンサやコンピュータには制限があり、限られた範囲でしか環境を観測できないという点である。しかし、ロボットは自分の位置及び目的地、さらに障害物の位置を知ることができれば、衝突することなく目的地へ到達できるだろう。必要な情報を適切に使用できれば、ロボットは人が生活する空間であっても適切に移動することができる。では、どうにかして、人が生活する空間を大きく変えることなく、かつ、空間を移動するロボットを支援できないか。そこで、人やロボットの行動を空間から観測することを考える。
空間知能化のコンセプト
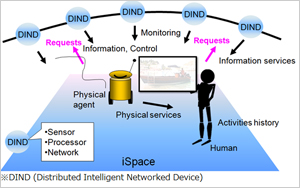
(空間知能化の適用された空間は知能化空間Intelligent Space(iSpace)と呼ばれる)
ロボットだけにセンサを搭載するのではなく、空間にセンサを配置するのである。一つのセンサで観測できる範囲は限られているから、複数のセンサを配置する。そして、それぞれをネットワークでつなぐことによって、一つのセンサでは観測できない広域な空間の観測を実現する。カメラやレーザ測域センサを空間に取り付けて、人、及びロボット、障害物の位置を算出すれば、ロボット自身でそれらの位置を計測する必要はない。空間から移動に必要な情報を受け取る機能を有していればよいということになる。一方で空間は、センサデータを処理し、必要な情報を算出し、それらの情報を必要とするものに提供するという機能を有することとなる。さらに、人及び物の位置情報はセキュリティを目的とした観測にも有用であり、ロボットだけでなく人が活用することも考えられる。
空間に分散して配置されたセンサを用いて空間内の様子を観測し、有用な情報を抽出して必要とするものへ提供する、さらには観測結果に応じてロボットなどの機器を適切に制御することにより人に対して作用をもたらす、という一連のプロセスを空間知能化と呼ぶ[1]。
ロボットが人と同じ日常空間に存在し、空間の知能化によりロボットも自在に移動することが可能となる。では次に、人と共生するロボットのコミュニケーションについて、動物行動学に基づくアプローチを紹介する。
動物行動学に基づく人とロボットのコミュニケーション
人とロボットが同じ空間に存在し続けるとき、どうのようにしたら、人とロボットの間に長期間にわたって持続できる関係を築くことができるのか。それを実現する一つのアプローチとして、筆者は動物行動学における知見に着目している。人と犬の共生関係である。

知能化された空間とロボットによる見守り支援システム
犬は、人が社会的関係を築き、共に生活できる数少ない“人間以外の種”である。動物行動学者はこの要因として「人は犬の振舞いについて事前知識や特別な訓練なしに解釈できる」ということ、及び「犬は適切なタイミングで適切な行動をとる」ことであると述べている。動物行動学では犬の身体部位の動作だけなく、犬の周辺で起こる環境の変化と、それに応じて表れる犬の行動を対応付けて観測する。たとえば、ある限られた空間に犬と犬の飼い主がいたとする。その空間から飼い主がいなくなった場合、犬はどのような行動を示すか、ということを観察から調べていくのである。もちろん、犬によって行動の特性は異なる。人懐っこい犬もいれば、警戒心の強い犬もいる。環境の変化と犬の行動、及び行動特性をロボットが使用できるかたちにモデル化(ルール化)することが、人とコミュニケーションのとれるロボットを実現するための課題となる。一方で、前に述べたように、知能化された空間はこのような環境の変化を観測することが得意である。そのため、知能化された空間と組み合わせることによって環境の変化に対応して適切に振舞うロボットの実現に近づくことができる。
現在は、空間のセンサを用いた見守りとその状況を知らせるロボットとして位置づけて、人とロボットの共生について研究を進めている。
人・ロボット・空間の共生に向けて
空間知能化の魅力的な点は、空間だけで、または人だけ、ロボットだけで機能が完結するものではないという点である。空間はセンサによって人やロボットの振舞いを観測し、計算機によって意味のある情報を抽出していく。たとえば人が歩いた経路を抽出することによって、ロボットの経路とすることが可能である[2]。また人の活動を観測することよって、人がその空間をどのように利用するのかを知ることができる[3]。すなわち、人やロボットが実際の環境で活動しなければ何の情報も得られず、空間は賢くはならないのである。また空間が情報や機能を提供することによって、ロボットは賢く移動できるようになり、人の活動も支援されることにつながる。この相互補完関係が共生のはじまりではないかと考えている。人とロボットの関係も、はじめから信頼関係を築くことはできないだろう。けれども、長い時間をかけて関心を喪失することなく共に過ごすことができたときにはきっと、人とロボットの間にも何か愛着のようなものが沸いているのではないかと期待している。
参考文献
- [1]橋本秀紀+渡邊朗子、“空間知能化のデザイン 建築・ロボティクス・ITの融合”、NTT出版、2004.
- [2]Takeshi Sasaki, Drazen Brscic and Hideki Hashimoto, "Human Observation Based Extraction of Path Patterns for Mobile Robot Navigation," IEEE Transactions on Industrial Electronics, Vol.57, No.4, pp.1401-1410, 2010.
- [3]Mihoko Niitsuma, and Hideki Hashimoto, "Observation of Human Activities Based on Spatial Memory in Intelligent Space", Journal of Robotics and Mechatronics, Vol. 21, No. 4, pp. 515-523, 2009.
- 新妻 実保子(にいつま・みほこ)/中央大学理工学部助教
専門分野 ヒューマン・インタフェース、空間知能化、人とロボットのインタラクティブコミュニケーション - 福島県いわき市出身。 1979年生まれ。
2007年東京大学大学院工学系研究科博士課程修了
博士(工学)(東京大学)
2007年-2009年日本学術振興会 特別研究員
(東京大学生産技術研究所 橋本研究室 博士研究員)
2009年4月より現職
空間知能化、及び空間知能化におけるヒューマン・インタフェース、
人とロボットのインタラクションに関する研究に従事。
http://www.mech.chuo-u.ac.jp/~hslab/
