

Top>Research>Development of Bio-inspired Robot for Space Exploration―Earthworm Type Robot on the Moon
 Index
Index

Development of Bio-inspired Robot for Space Exploration
―Earthworm Type Robot on the Moon
Taro Nakamura
Professor, Faculty of Science and Engineering, Chuo University
Areas of Specialization: Robotics and Mechatronics, Mechanical Systems, Intelligent Mechanics
1. Introduction
Currently, my laboratory is replicating creatures such as earthworms, water striders, snails, and wharf roaches in order to develop robots which are capable of performing in extreme environments of medicine, outer space, materials exploration, and ultra-thin tubes![]() . Recently, my robots which replicate earthworms and wharf roaches were adopted for the "Ideas Incubating Research" program at the Space Exploration Innovation Hub Center
. Recently, my robots which replicate earthworms and wharf roaches were adopted for the "Ideas Incubating Research" program at the Space Exploration Innovation Hub Center![]() of JAXA.
of JAXA.
This theme aims to use small exploration robots which replicate the movement of earthworms and wharf roaches to realize a space exploration system in which several robots are dispersed on the surface and underground areas of planets and moons. By moving while linked with each other, these robots will gather information and perform environmental measurement (Figure 1). Through close collaboration with JAXA, my research is directed at developing these robots and conducting in-depth surveying for broad, unexplored areas of moons and planets.
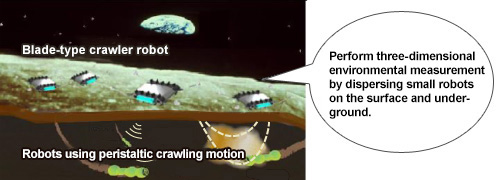
Figure 1: Overview of the moon/planetary exploration system
Furthermore, as mentioned above, the application of this robotic technology is not limited to space exploration. It will also be useful for gathering information and performing maintenance in a variety of extreme environments on the earth's surface. Some applications include piping inspection, subsurface exploration, seabed material exploration, and work in disaster areas.
In this article, I will introduce the Subsurface Explorer Robot Based on using peristaltic crawling motion (earthworm type robot), which explores underground areas while digging into the surface, and the blade-type crawler robot (wharf roach like robot), which explores a wide surface area at high speed.
Also, at the end of this article, I will briefly introduce other joint research projects which I am conducting together with other laboratories and with JAXA. For example, I am developing propellant manufacturing equipment using an intestinal-type pump for solid-fuel rockets.
2. Subsurface Explorer Robot Based on Using Peristaltic Crawling Motion (Earthworm Type Robot)
Currently, there is great demand for burrowing robots which can explore underground areas of moons and planets. These robots are needed to install seismographs on moons and planets, to search for underground resources in the regolith (moon sand) layer, and to search for underground water. In order to respond to these needs, this research is aimed at burrowing by using the peristaltic crawling motion of earthworms.
2.1 Movement of Earthworms and Characteristics
In the past, an imaginary underground drilling vehicle named The Mole appeared on the special effects program Thunderbirds. I was shocked by the idea of a vehicle which could move underground while drilling, even though I was skeptical of the drive mechanism used by the machine — namely, there was no mechanism to support drilling torque at the moment that the main body separated from the foundation, thus causing the main body itself to rotate!
Upon further reflection, there are creatures like earthworms and moles which burrow through the earth. Earthworms move by using a method known as peristaltic crawling motion. peristaltic crawling motion is achieved by a longitudinal wave of elongation and contraction that moves in a given direction to propel the subject forward, and is also seen in the human esophagus, intestine and elsewhere. Movement by peristalsis is slow and, at first glance, seems inefficient. However, this method of moving is functionally unique and useful in a way not seen in other motion mechanisms. These characteristics of this movement are listed below.
(1) Minimizes the space needed to move.
(2) Secures a large contact area with the surrounding environment.
(3) The interior is the esophagus and is a hollow cavity.
When interpreting the characteristics listed above through an engineering perspective, (1) is appropriate for movement underground and through thin tubes. (2) results in large pulling and pushing force, which is effective for long-distance movement and pushing during burrowing. (3) makes it easy to install burrowing devices, cameras, and other equipment inside of the robot. Overall, it is clear that earthworms are creatures which possess an effective motion mechanism from the perspective of engineering.
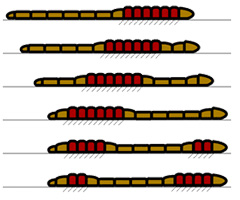
Figure 2: peristaltic crawling motion of an earthworm
The pattern for forward movement of an earthworm using peristalsis is shown in Figure 2. An earthworm consists of approximately 150 segments, and is capable of extending these segments to be "long and thin" or contracting the segments to be "short and thick." When moving, the earthworm first contracts its anterior segments. The contraction propagates continuously towards the rear while extending the anterior segments. Friction is generated between the contracted segments and the surrounding surface, thus generating the counterforce required for the extended segments to stretch forward. The earthworm moves forward by repeating this contraction and extension.
2.2 Burrowing Mechanism of an Earthworm Type Robot
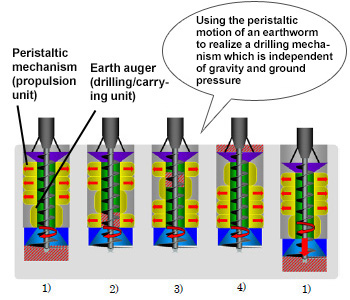
Figure 3: Drilling of an earthworm type robot
When burrowing in underground areas of the moon and other small celestial bodies, it is necessary to use an earth auger (drill) in order to realize solid support for the burrowing counterforce and to minimize the impact of ground pressure (similar to water pressure) and gravity in relation to the press force when burrowing. At the very least, if these conditions are not fulfilled, the drill of the robot would spin idly during burrowing (or the robot itself would spin) and the robot could no longer move forward. However, the conditions are resolved by the motion mechanism of an earthworm in an ingenious manner.
I would now like to explain how an earthworm type robot burrows underground. Figure 3 shows an overview of how the robot drills through the ground. This robot uses an earth auger for excavation and carrying, while using the peristaltic crawling motion of an earthworm for the propulsion and counterforce support mechanism. When part of the advancing portion of the robot contracts to become "short and thick," the robot pushes against the drilling wall surface. This friction supports the counterforce for rotation of the earth auger and pushing against the drilling surface. Furthermore, by extending to become "long and thin," it is possible to obtain pushing force for the earth auger regardless of gravity, and it also reduces the friction with the wall surface. This enables the robot to burrow deeply regardless of ground pressure, even in low-gravity environments like the moon.
Finally, Figure 4 (Video 1) shows actual burrowing being performed by an earthworm type robot. Currently, in this digging radius class, the robot has succeeded in burrowing to a depth of approximately 1 m, which is the deepest in the world (burrowing was stopped because the robot drilled to the bottom of the earth tank). Currently, we are utilizing the characteristics of a burrowing robot to develop a new mechanism which enables the robot to burrow and explore a broad horizontal range after burrowing while bending.
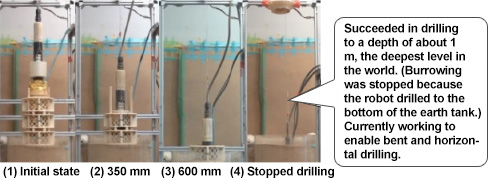
Figure 4: Drilling by a robot using peristaltic motion (Video 1)
3. Blade-type Crawler Robot (Wharf Roach Like Robot)
3.1 What is a Blade-Type Crawler Robot?
Figure 5 shows a photograph of a robot which moves using crawlers. This research focuses on a small, high-speed robot for irregular terrain which was proposed by Assistant Professor Yasuyuki Yamada, a member of my laboratory.
Many irregular-terrain robots which are currently being developed used a slower movement speed in order to improve running performance on irregular terrain. However, in addition to the ability to navigate irregular terrain, there is also demand for increased movement speed and simpler mechanisms in the movement mechanism for irregular-terrain robots which gather information and perform tasks.
In response to these demands, we developed a blade-type crawler robot which is modeled after the multi-legged walking motion of creatures such as wharf roaches and centipedes. This is a completely new mechanism which realizes both running performance on irregular terrain and high speed of movement. As shown in Figure 6, this blade-type crawler robot is made by attaching blades which bend passively to the crawler belt. As shown in Figure 6(a), this design enables the robot to drive like conventional crawlers at low speeds, securing a wide contact surface. As shown in Figure 6(b), the blades open at high speeds, thus artificially increasing the wheel diameter. This reduces the impact of uneven surfaces and improves running performance over irregular terrain. Moreover, each of the blades acts like a leg, thus creating a space between the robot and the ground surface. This has the effect of an artificial suspension function.

Figure 5: Blade-type crawler robot (Video 2)
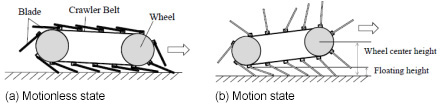
Figure 6: Mechanism of a blade-type crawler robot
3.2 Applied Technology for Ground Surface and Future Themes
Until now, in order to simulate actual operation, we have manufactured irregular-terrain mobile robots which are equipped with proposed mechanisms and held repeated field tests in locations such as the Black Desert of Izu Oshima Island. During testing, we qualitatively evaluated the terrain-running performance and moving performance of the robots. As a result, the robots reached a moving speed of 10 km per hour, which is top-class in the world for similarly-sized irregular-terrain mobile robots which replicated multi-legged walking. (Video 2)
In this project, we plan to further reduce the size of the blade-type crawler robot and to conduct exploration on the surface of planets and moons, which are environments thought to resemble volcanic regions such as the Izu peninsula. By using numerous robots, our goal is to establish an innovative exploration system from a perspective which is completely different from that of conventional large-scale rovers.
4. Other Cooperation with JAXA
Currently, in addition to the project discussed above and as part of the "Project for Research and Development of a Technological-Information Platform for Space Industry" which is conducted by the METI and JAXA, my research laboratory (Biomechatronics Lab, Department of Precision Mechanics, Faculty of Science and Engineering, Chuo University) is also involved in a project![]() to develop propellant manufacturing equipment for solid-fuel rockets. This research uses a peristaltic pump
to develop propellant manufacturing equipment for solid-fuel rockets. This research uses a peristaltic pump![]() which is modeled after the structure of intestines. Although I will omit the details here, this project is an extremely creative method for solving problems associated with solid-fuel rockets. The project is expected to realize technology leading to major innovations which may change common sense in relation to solid-fuel rockets of the world.
which is modeled after the structure of intestines. Although I will omit the details here, this project is an extremely creative method for solving problems associated with solid-fuel rockets. The project is expected to realize technology leading to major innovations which may change common sense in relation to solid-fuel rockets of the world.
5. Conclusion
In this article, I discussed the development of mobile robots which are modeled after earthworms and wharf roaches, and are intended for exploration of the moon and planets. Together with undergraduate and graduate students at my laboratory, I am working hard to accelerate this project so that theses robots will perform in outer space in the near future.
- Taro Nakamura
Professor, Faculty of Science and Engineering, Chuo University
Areas of Specialization: Robotics and Mechatronics, Mechanical Systems, Intelligent Mechanics - Taro Nakamura was born in 1975. He completed the Doctoral Program at the Interdisciplinary Graduate School of Science and Technology, Shinshu University. From 1999 he served as assistant professor at Akita Prefectural University. He has served on the Faculty of Science and Engineering, Chuo University as lecturer from 2004, associate professor from 2006, and professor since 2013. From 2012 to 2013 he was a visiting professor at the Swiss Federal Institute of Technology in Lausanne. He holds a Ph.D. in engineering.
He is engaged in the development and control of smart actuators such as artificial muscle and functional fluids, and the development and application of biorobotics modeled on living creatures. He has received awards such as the 2009 Young Investigation Excellence Award from the Robotics Society of Japan, the 2010 Young Engineers Award from the Japan Society of Mechanical Engineers, the 2011 Young Scientists’ Prize from the Ministry of Education, Culture, Science and Technology. His recent work includes Artificial Muscle – A Graphic Representation [Zukai – Jinko Kinniku] and others. - Nakamura Lab (Biomechatronics Lab), Chuo University


- Research Activities as a Member of Research Fellowship for Young Scientists (DC1), Japan Society for the Promotion of Science (JSPS) Shuma Tsurumi
- Important Factors for Innovation in Payment Services Nobuhiko Sugiura
- Beyond the Concepts of Fellow Citizens and Foreigners— To Achieve SDGs Goal 10 “Reduce Inequality Within and Among Countries” Rika Lee
- Diary of Struggles in Cambodia Fumie Fukuoka
- How Can We Measure Learning Ability?
—Analysis of a Competency Self-Assessment Questionnaire— Yu Saito / Yoko Neha - The Making of the Movie Kirakira Megane