


トップ>研究>大腸の動きに着目した「蠕動運動」でロケット燃料を作る
 一覧
一覧

中村 太郎【略歴】
大腸の動きに着目した「蠕動運動」でロケット燃料を作る
―中央大学発ベンチャー企業「Solaris」:事業化への挑戦―
中村 太郎/中央大学理工学部教授
専門分野 ロボティクス・メカトロニクス、機械システム、知能機械学
はじめに
中央大学とJAXAが、世界で初めてとなる固体ロケット推進薬(燃料)を連続的に生成する装置を開発し、生成された推進薬の燃焼実験に成功した。2018年3月16日にその開発内容について記者会見を行った。この装置は、大腸の蠕動(ぜんどう)運動の動きを人工筋肉によるソフトアクチュエーションによって再現した「蠕動ポンプ」という独創的な技術を用いることで実現した。本装置により固体ロケットの生産コストが劇的に抑えられる可能性があり、日本における宇宙産業のプレゼンスの向上につながることが期待されている。
さらにこの装置は中央大学で初めてとなる公式のスタートアップ系大学発ベンチャー「Solaris(ソラリス) 」にて事業化される予定である。本報では、これらの詳細な内容について述べていく。
なぜ大腸の運動なのか? ―基本原理の発想は、トイレの中で思いついた!―
現在、土砂やセメント、食品や薬品の生成や搬送など、様々な現場における最終製品・中間材料として、固液混合流体(固体と液体がごちゃ混ぜになった流体)や高粘度流体(ハチミツのようなねっとりとした流体)の混合搬送技術が求められている。しなしながら現在、これらの搬送・混合技術は以下のような大きな問題を含んでいる。
・搬送に大きなエネルギが必要となり、装置が大型化する。
・被搬送物と搬送物の間に大きな力(摩擦・せん断力)がかかり、発熱や衝撃によりその組織や構造が崩壊してしまう。
・しばしば混合と搬送技術は別途の装置が用いられており、その一連の工程がバッチプロセスとなる。(人件費や工程に時間がかかる。人が介在することも多く、危険物の場合は扱いが難しい)
実は以上のような問題を解決するため、著者は長い間悩み続けて大腸の蠕動運動という発想にたどり着いた。
思いついたきっかけは、著者らが開発しているミミズロボットの運動原理を使って何かを搬送することができないか?と考えていた時に、ちょうどおなかを壊したことがあった。トイレの中でおなかを抑えながら、自分のおなかの大腸の動きに思いを馳せた時、この大腸の運動はミミズと同じ蠕動運動であり、内側に同じような運動を起こせば搬送・混合・脱水等の多機能なポンプとして使えるのではないか?と思いついた。トイレから出た後自分で整理して考えたところ、この蠕動運動により、小さいエネルギでの搬送・混合が可能となり、そのせん断力も小さい。また搬送と混合の連続化も可能となり、上述の3点の問題を解決できる可能性があると思った。この時はまだどのような構造で具現化するかは全く想像もつかなかったが、これはうまくいく!と直感的に思った。と同時にその当時はこれほどたくさんの応用分野に発展し、大きなプロジェクトになるとは思ってもみなかった。
大腸の運搬と混合のしくみ
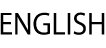
みなさんは大腸がどのようにして人間がたべた食塊を運搬しているかご存じだろうか?- 図1のように、大腸は半径方向に収縮する環状筋と長軸方向に収縮する縦走筋という2つの筋肉で構成されている。これら筋肉によって内側方向へ閉じる力と長軸方向への収縮力がうまれ、その動きを連動させることにより図2のような収縮波をともなった「蠕動運動」や「分散運動」という独特の動きを発生させる。この動きは食塊を搬送したり液体と食塊を混合しながら搬送する機能を持っている。
“感覚的”には、袋に入れた液体を外側から手で握りつぶしながら搬送したり混ぜたりする動作と似ている。
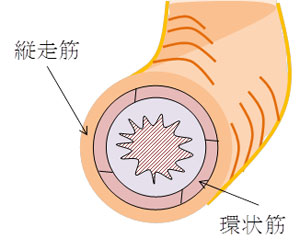
図1 大腸の筋肉構造
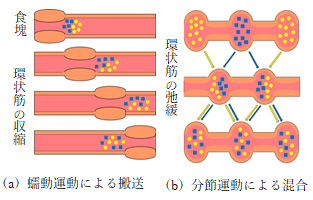
図2 大腸の蠕動運動と分散運動
蠕動ポンプの開発 -蠕動ポンプのしくみについて-
著者らは2008年ごろに、上述のような「蠕動運動」をはじめとした大腸の運動に着目した図3のような蠕動ポンプを開発した。このポンプの大きな特徴は「大きい面積で」「柔らかく」「揉むように」押し出す動作を実現することである。しかしながら従来のモータのような回転運動を中心とした駆動装置(アクチュエータ)ではこのような運動の実現は非常に難しかった。おそらく現在まで大腸のようなポンプが発想段階においても提案されてこなかったのは、そもそもこのモータの動きに限界があったからであると考えている。
一方、著者らがこの蠕動運動を実現するために注目したのは「空気圧人工筋肉」である。この人工筋肉は著者らによって開発された柔らかくて力が強いソフトアクチュエータである。この技術を取り入れることで、今までにない全く新しい構造を発想することができた。
図4にポンプを構成している1ユニット断面図を示す。このユニットの外側に人工筋肉を配置し、内側にゴム円筒チューブを配置することで、大腸管の環状筋と縦走筋に見立てた機構を提案している。内部に空気圧を加圧することで、ユニットは長軸方向に収縮するとともに、円筒チューブは内側に膨張し、ユニット内部を閉鎖することができる。
図5に固液体混合流体の垂直搬送の様子を示す。なお、本作動流体として固体含有率30%のときの固液体混合流体を用いている。この図より、固液体の垂直搬送が可能であることが確認できる。なお20000[mPa・s](水あめぐらいの粘度)の高粘度流体を垂直搬送にも成功している。
図3 蠕動ポンプの概要
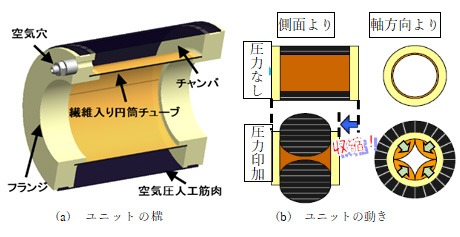
図4 蠕動ポンプのユニットとその挙動

図5 固液混合流体4の垂直搬送実験の様子
蠕動ポンプで固体燃料ロケット燃料を作る! -ロケット製造の概念を変える!-
電子製品の急激な発達により人工衛星が小型化してきている。これに伴い打ち上げるロケットも小型化しており、小型化に適している固体燃料ロケットの需要が高まってきている。日本での固体燃料ロケットは、糸川英夫博士による1955年のペンシルロケットの飛翔実験から最近ではイプシロンロケットまで長い歴史と実績があり、日本のロケットの完成度と打ち上げ技術は世界トップレベルと言われている。一方、人件費をはじめとしたコストが他国よりも高く、国際的な競争を鑑みた場合、大きな障壁となっている。
固体燃料ロケットの推進薬は固体の燃料と酸化剤を混練することで生成される。これまで生成方法は、金属のブレードを金属ボールの中で回転させて攪拌するプラネタリミキサで混合して、別途人力で搬送するバッチ式で製造されている。そのため、現在の製造手法は、製造装置の維持管理、工程管理の観点でコスト低減へのハードルが高く、安全面に配慮しつつ新たな製造手法の検討を進めることが難しい状況であった。これらの手法は50年以上変わっておらず、NASAをはじめとした欧米各国でも新方式の開発に挑戦したが、うまくいかなかった。
そこで著者らはJAXAとともに、図5の蠕動ポンプの原理を使えばこれらの問題か解決できるのではないかと考えた。図6に開発された蠕動運動型混合搬送装置を示す。本装置は固体推進薬の混合や搬送を安全かつ連続的に実現することで、その製造プロセス全体を見直して、コストの抜本的な低下を目指している。大腸の蠕動運動を模した「大きい面積で」「柔らかく」「揉むように」押し出す動作を実現しているので、攪拌ブレードの必要なしに固体燃料を安全かつ連続的に図7のように混合し、ロケット本体まで搬送することが期待できる。
2018年2月にJAXAや日本カーリット株式会社の協力を得て、世界で初めての蠕動運動型混合搬送装置をつかった本格的な固体推進薬の燃焼試験を行った。その様子を図8に示す。実験は見事成功し従来方法で製造した方法と同じ出力特性を得られた。

図6 固体推進薬製造のための蠕動運動型混合搬送装置

図7 固体推進薬混合の様子
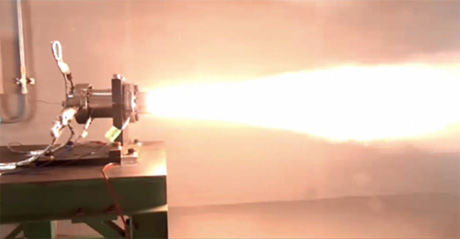
図8 蠕動運動型混合搬送装置による固体ロケット用推進剤の燃焼試験の様子
中央大学発ベンチャー 「ソラリス」での事業化を目指す!
2017年9月、中央大学で得られた研究成果に基づいて事業化を目指す、中大で初めてのスタートアップ系ベンチャー企業「Solaris(株式会社ソラリス)」が発足した。主な創設メンバーは著者と著者が運営する研究室に所属する山田泰之助教である。
本来は研究室で開発された人工筋肉等のソフトアクチュエーションやソフトロボティクスに基づいた革新的な技術システムの開発事業を目指しているが、当面はこの技術がコア技術として含まれている固体燃料ロケット用の蠕動運動型搬送装置の事業化に注力する。今後の中央大学とソラリスの活躍にぜひ注目してもらいたいと思う。
- 中村 太郎(なかむら・たろう)/中央大学理工学部教授
専門分野 ロボティクス・メカトロニクス、機械システム、知能機械学 - 1975年生まれ。信州大学大学院工学系研究科博士後期課程修了。1999年、秋田県立大学助手。2004年、中央大学理工学部専任講師, 2006年、同大学准教授をへて、2013年より同大学教授。2017年株式会社ソラリスCEO、現在に至る。2012-2013年までスイス連邦工科大学ローザンヌ校Visiting Professor。博士(工学)。人工筋肉を用いたスソフトロボティクスの開発と制御、および生物を規範としたバイオロボティクスの開発と応用に従事。2011年、文部科学大臣表彰若手科学者賞などを受賞. 単著に「図解 人工筋肉」等がある。
