


トップ>研究>脳卒中患者の機能回復訓練の支援を目的とする電動グローブの開発
 一覧
一覧

諸麥 俊司【略歴】
脳卒中患者の機能回復訓練の支援を目的とする電動グローブの開発
諸麥 俊司/中央大学理工学部准教授
専門分野 生体情報計測、医療工学、福祉工学
脳卒中は脳の血管が詰まったり破れたりすることで脳細胞の壊死を生ずる疾患であり、国内では毎年約30万人が新たに発症しているとされている。発症時に適切な治療を受け、危険な状況を回避できたとしても手足の運動麻痺などの後遺症を生ずるケースが多く、症状改善のためには長期に渡るリハビリ訓練が必要となる。
脳卒中の上肢リハビリにおいて、特に手指の機能回復は重要視されている。これは手指機能の回復が日常生活における手の利用頻度を高めると同時に、リハビリ病院等の医療機関においても多様なリハビリメニューの利用を可能とし、結果として上肢全体の早期機能回復に繋がるからである。しかし、医療機関で実施される手指リハビリ訓練は療法士の徒手による指運動訓練やペグボードなど上肢作業訓練などが主であり、ほぼ1対1でつきっきりの対応が求められるため、患者の多い病院では十分なリハビリの実施が困難なケースも生じている。少子高齢化を背景に、より効果的でかつ少ないスタッフにより実現可能なリハビリ方法が求められている。
このような状況を踏まえて、筆者の研究室では長崎大学大学院医歯薬学総合研究科の東登志夫教授と共同で、軽量・コンパクトな装置構成でありながら、療法士が行うような複雑な指運動をも可能とする、脳卒中患者向け電動式グローブシステムの開発に取り組んでいる。本稿では開発中のシステムと、最近の臨床評価試験の結果について紹介したい。
システムの概要

Fig1-試作装置
開発中のグローブシステムは、(1)使用者が手に着用する“装具部”、(2)装具部の動きを制御する“コントローラ”、(3)使用者の意図を読み取るための筋活動センサ、の3つに分けて考えることが出来る。図1に試作した装置の写真を示す。写真の上部に写っているのがコントローラを収納するケースで、駆動ユニット、マイコン制御回路、センサ信号処理回路を収納する。ケースのフタ内側にはセンサとグローブも収納可能であり、システム一式をケースに収めて持ち運びが可能となっている。写真の中程に写っているのは、左から順に筋活動量センサ、ケースから引き出したマイコン制御回路およびセンサ信号処置回路であり、一番下に写っているのが装具部である。筋活動センサは利用者の前腕に伸縮性ベルトにより固定され、指の伸展運動あるいは屈曲運動を司る筋肉の微弱な活動量を検出する。検出されたデータによりコントローラは利用者の指運動意図を推定することが出来る。装具部は特別に設計した革製の手袋であり、内部に人の手の腱を模して配置した樹脂性の糸(駆動糸)がめぐらされている。駆動糸は指の伸展運動用と屈曲運動用でそれぞれ2本ずつ、合わせて4本備えられている。これらの駆動糸はコントローラの駆動ユニットに接続されており、センサで検出された利用者の指運動意図に基づいて、コントローラが動力伝達ケーブルを介して個別に牽引することで手袋の形状が変化し、様々な指先軌跡を伴う指運動を実現している。本試作装置は実験用であるため、人差指あるいは中指のどちらか片方の指の運動を可能とするよう設計されている。
可能となる手指リハビリ訓練
本グローブシステムによる手指リハビリ訓練はつぎの手順に沿って実施される。まず、利用者の手に装具部を装着する。次に、本システムの手動操作モードを利用して、医師あるいは療法士がマイコン制御回路の小型レバーの操作でグローブ装着者の指姿勢を変えながら押しボタンを押すことで、複数の指姿勢をコントローラに記憶させる。この指姿勢の記録の後に、スタートボタンを押すと、コントローラは記憶した指姿勢を、補間を行いながら順次実施する。その結果、医師あるいは療法士の意図したとおりの指先軌跡を伴う指運動が実行される。この指運動は利用者が指を伸展あるいは屈曲させようと努力している間のみに行われ、休むと指は運動の途中で停止する。また指運動の実行回数は事前にコントローラに指定することできる。例えば指先で円を描くような動作を記録させ、回数を100と設定してスタートボタンを押すと、利用者の運動努力を伴った100回の指先円運動の訓練を実施することが出来る。
臨床評価試験

Fig2-臨床評価試験の様子
長崎市の三原台病院の協力を得て、本グローブシステムを用いた手指リハビリ訓練の効果を検証する試験を実施した。被験者は87歳女性1名で、7年前に脳梗塞を発症、以来右片麻痺を負っており、右手での対象物把持動作が困難である。病院での毎日の上肢リハビリ訓練の途中25日間(介入期間)だけ本装置による20分間の指先円運動訓練を追加で実施していただいた。グローブシステムを用いたリハビリ訓練の様子を図2に示す。上肢運動機能の評価には簡易上肢機能検査(STEF)と脳卒中片麻痺10秒テスト、さらに上肢使用状況評価(MAL-AOU)を用いた。いずれも脳卒中患者の上肢運動機能の評価に広く用いられる試験である。ここでは紙面の都合上、各試験の詳細についての説明は割愛する。
本実験はシングルケーススタディのABデザインを採用した。つまり、介入前の15日間(A)をベースラインとし、介入期間の25日間(B)と各試験スコアの比較を行う。計40日間に渡り、5日おきに上肢機能評価を行い、介入前3回、介入期間5回の計8回の測定データを得た。データの解析には2-standard deviation (SD) band分析に基づいて行った。この分析手法では、統計的方法ではなくグラフの読み取りによって解釈を行うもので、リハビリ介入前のスコア(ベースライン)の平均にその期間の標準偏差の2倍を加えた値よりも介入時のスコアが高ければ、リハビリ効果があると判断する。
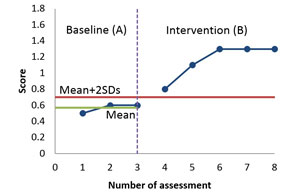
Fig3-試験期間における上肢使用状況の推移-MAL-AOU
いずれの試験のスコアもベースラインに比べて介入期間におけるスコアの上昇が見られ、被験者1名による試験ではあるものの、本グローブシステムを用いた指運動リハビリの優れた効果を確認することができた。図3にMAL-AOUの測定結果を示す。このデータからグローブシステムを用いたリハビリ開始後に、麻痺側の手の機能が改善し、日常生活で使用する頻度が有意に増えていることが見てとれる。
なお、本研究成果については昨年、デンマークのオールボー市で開催された脳神経工学に関する国際会議ICNR2014において発表を行っている。
早期機能回復を可能にする新しい訓練方法の実現に向けて
運動麻痺などの脳卒中の後遺症に悩む人にとって、如何に機能回復を果たし、生活を再建するかは切実な問題である。本研究では主に脳卒中による上肢運動麻痺を負った人向けに、新しい機能回復訓練の手段として軽量・コンパクトな電動式グローブを提案し、開発を進めている。現時点では、試作装置を用いて被験者1名による臨床評価試験を行ったところであるが、一定の効果を確認することが出来た。今後、更に多くの被験者で試験を行い、より詳細な評価を行うと同時に、更に効果的な上肢リハビリの実現に向けて装置の改良を進めたい。
文献
- (1) 庄本康治、シングルケースデザインの意義と重要性、理学療法学、第34巻第4号、202-205頁(2007)
- (2) S. Moromugi, T. Higashi, R. Ishikawa, S. Kudo, N. Iso, S. Ooso, T. Shirotani, M. J. Lawn, T. Ishimatsu, Exotendon glove system for finger rehabilitation after stroke, Replace, Repair, Restore, Relieve – Bridging Clinical and Engineering Solutions in Neurorehabilitation, Biosystems & Biorobotics, Volume 7, 2014, pp 93-102(2014)
-
諸麥 俊司(もろむぎ・しゅんじ)/中央大学理工学部准教授
専門分野 生体情報計測、医療工学、福祉工学 - 鹿児島県出身。 1973年生まれ。 1997年長崎大学工学部機械システム工学科卒業。
1999年電気通信大学大学院情報システム学研究科修士課程修了。
2003年カリフォルニア大学アーバイン校工学研究科博士課程修了。 Ph.D.(UC Irvine)
2002年長崎大学工学部助手着任。 2007年同学部助教に配置換え。
2014年4月中央大学理工学部電気電子情報通信工学科准教授着任。 現在に至る。
現在の研究課題は、生体情報計測技術やロボット技術を応用した障害者支援技術、医療ロボット、各種治療機器等の研究である。
