ロボットでくらしはどう変わる? ―― 知能化・共生・協働がもたらす世界
「中央大学×大手町アカデミア」第4回
新妻 実保子(にいつま みほこ)/中央大学理工学部精密機械工学科 教授
中央大学が長年培ってきた「価値ある知」を伝える講座「中央大学×大手町アカデミア」。第4回は、理工学部教授の新妻実保子氏が、人とロボットの共生をテーマに講演しました。その模様を紹介します。
人と社会の理想を実現するために
私たちはすでにデジタル化された情報をビジネスやコミュニケーションの場で広く活用する情報化社会に生活しておりますが、人が手間をかけてデータを入力したり、データを活用するにも人が手間をかけてアクセスしたりする必要がありました。これに対して可能な限り人の手を借りずにデータの獲得と蓄積、活用するためのテクノロジーを導入して、持続可能な社会の実現に向けて問題解決に取り組むのが、政府が提唱したSociety5.0の概念であり、それを実践する場がスマートシティと位置づけられます。そこでは防災や車の自動走行、物流、健康、医療、介護など様々な生活に関わる場面でロボティクスを含むテクノロジーの活用が期待されています。
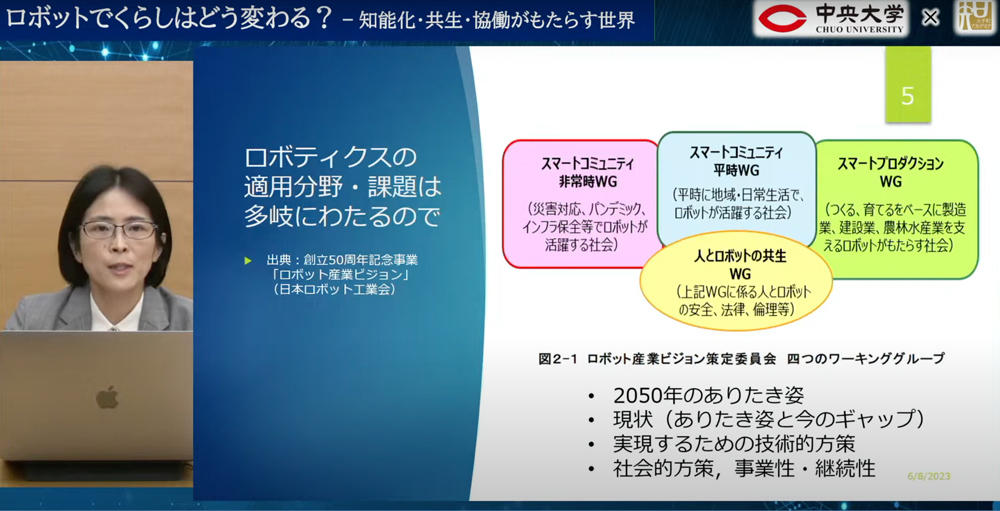
将来の社会におけるロボット活用については様々なところで展望されており、今回は日本ロボット工業会の創立50周年を記念して策定された「ロボット産業ビジョン2050(Ver.0)」を紹介したいと思います。ビジョンでは2050年のありたき姿を、人と社会がともにウェルビーイング(個人の権利や自己実現が保証され、身体的、精神的、社会的に良好であること)な状態であることを目標とし、その実現のためにロボットがどのように貢献できるのか、提言しています。
例えば災害時には災害現場での救助、捜索活動、危険物処理、高所作業などを通して、人とロボットが協働して早期復興を目指すことがありたき姿として掲げられています。時間的、空間的に途切れることなく救助捜索活動を実施するロボットシステムの実現が期待されています。また、ロボットを構成する要素、例えばハンド技術や通信技術などの重要な要素技術を規格化することにより、日常に利用されるロボット技術を非常時にも利用可能にすることによって、非常時への効果的な備えにつながると期待されます。
また日常の生活を支援するロボットとして、ロボットによる育児、介護、教育といった専門的サービスの実現、同時に家庭での洗たく、掃除などの家事機能代行も考えられます。例えば介護現場では作業負担を軽減すること、人手不足を軽減することが期待されますが、ロボットの導入によって家庭においても、家事労働から開放されて、人が本来注力したい活動に取り組めるようにすることや、育児・介護・教育などを家庭に閉じた活動とせず、ロボットを介して社会とつながるオープンな活動に変化させることも期待されます。
さらに社会とのかかわりの中では、ヘルスケアデータの常時観測と長期的な蓄積により、変化の早期発見と利用者へ気づきを与えることが期待されます。同様の常時観測と変化の早期発見は人の健康だけでなく、様々な環境に関わるデータにも応用でき、例えば交通量や騒音の常時観測を行い、蓄積されたデータを活用することにより、効率的で安全な交通、物流システムの実現も期待されます。
また、製造・生産現場や人の働く環境では、ロボットとの協働作業の実現が期待されます。ロボットとの協働作業において、ロボットが得意とするタスクの一部を分担することができれば、人ならではの柔軟性、機動力、技能を生かして生産に取り組むことも可能になります。さらに、ロボットの遠隔操作による身体的、時間的、空間的制約を超えた活動が可能になれば、ワークシェアリングが促進し、柔軟な働き方やスキルの活用に繋がり、労働力不足の解決に寄与することが期待されます。
人とロボットが共生するために
人の生活環境は大きく分けて物理的環境と精神的環境に分けられます。これまでロボット工学の中で積み上げられてきた知見というのは、例えば、いかに階段を乗り越えるか、いかに物体を把持するかといった物理的な空間の中での活動に対して得られた知見が体系化されてきたといえます。しかしロボットが人の生活環境にて共生することを実現するためには、実は物理的環境だけではなく、文化的、社会的環境などを含めた生活環境でどのように振る舞えばよいかを考える必要があります。
ロボットの分野には技術課題や分野を特定してコンペティションを行うことを通じて、技術革新を図るという取り組みがあります。今回は、コンビニエンスストアにおけるロボティクスの活用を課題としたコンペティションについて紹介します。
Future Convenience Store Challengeというロボットコンペティションで、コンビニエンスストアの陳列・廃棄タスク、トイレ清掃タスク、接客タスクを自律ロボットにより実現するというコンペティションです。ここでは自律ロボットとは、人の操作なしに与えられた課題をロボット自らが認識、判断し、実行するロボットをいいます。
陳列・廃棄タスクでは、人とのためにデザインされたコンビニエンスストア内の様々な物体(パウチ食品やおにぎり、お弁当など)を目的にあわせてロボットがいかに操作するかということが課題になり、トイレ清掃タスクでは任意の場所に置かれたゴミや汚れを発見して、拭き取りまたは回収することが求められます。また、陳列も清掃も人の観点から見て整っている、綺麗になったということが重要で、そういった意図がルールに反映されています。接客タスクでは、人の店員とロボットとが協調することも求められ、人とロボットの役割分担や客に理解可能な働きかけなど、人の文化的・社会的ルールを踏まえた自律化が求められます。このように、ロボットが物理的作業を行うだけでなく、人の文化的環境の中でいかに行動し得るかについて課題が設定されたコンペティションが実施されています。

以降では、新妻の研究室での実際の取り組みの紹介を通じて、Society 5.0の重要なポイントである自動的なデータ化、及び蓄積データの活用によるロボットシステムの知能化と知能化されたロボットシステムと人との協働作業について実現技術や効果に関する知見、将来の課題について紹介します。
まず、ロボットによる自律的な道案内の実験について紹介します。ここで私たちは空間知能化というアプローチを用います。具体的には、環境に設置したセンサにより空間内の人や物を計測し、イベントをデータ化します。さらに目的に応じてデータを処理し、状況認識に活用します。認識した状況に基づき、目標を達成するようロボットへ情報を共有し、ロボットの自律的な行動の実施を実現します。自律的な道案内を実現するためには、環境に設置したセンサにより空間内の使用頻度や人の歩行経路を獲得します。このデータをもとに、人がこの環境を知っているのか、歩行時に目的地へ向かっているかなどを推定し、環境を知らず目的地も分かっていないと推定された場合に、ロボットはその人を目的地として決定し、自律的に目的地へ移動し、道案内を提案します。ロボット自身は人の位置や状況をセンシングできなくても、空間知能化システムとして統合されることにより、空間の状況を理解し自律的に働きかけることを実現します。このアプローチを空間知能化と読んでいます。
続いて、人のロボットの協働作業について見てみます。人がロボットと働きやすい条件として、特に、ロボットの速度が速すぎないこと、ロボットの作業意図が読みやすいことが重要とされています。人の作業状況に応じてロボットが適切なタスク選択を行うには空間知能化のアプローチが有効です。一方、働き手が多様化する中で、ロボットと協働するためには働き手の特性に応じたロボットからの情報提示や作業支援の設計が必要であるといえます。また、ロボットの行動は状況に応じて決まりますが、ロボットの行動、狙いが解釈できないと状況の理解につながらず、ロボットへの不信感につながる可能性があります。
最後に人とロボットの共生に向けた社会的な課題について、こちらも「ロボット産業ビジョン2050(Ver.0)」での議論を踏まえて、少しだけ紹介したいと思います。
私たちはどちらかというと技術開発に目が行きがちで、絶対に安全な技術でなければならないなどと考えがちですが、ロボット産業ビジョンでは、ロボットを人間社会に導入するために必要な社会的枠組みとして、技術開発に加えて、適切な安全基準、リスクが生じたときの保険制度といった三位一体の取り組みを挙げています。
技術開発の観点からは、本質安全設計、機能安全によるリスクの低減に取り組み、通常予見される残留リスクを見積もり開示することは前提であろうと考えます。しかし、リスクを過度に重視し過ぎて、ロボットを活用する利便性を十分に得られなかったり、導入さえチャレンジできない状況であったり、そもそもイノベーションが起こりにくいといわれています。
適切な安全認証制度や保険制度を設けるとともに、「合理的に実行可能なリスクの低減」という観点から、許容できない領域のリスクと許容できる領域、その間にあるリスクという形で区別して考えるリスクの考え方もアップデートが必要かもしれません。
新規技術には大きなベネフィットもあれば、リスクを含んでいる場合も想定されます。ベネフィットの最大化とリスクの最小化を達成するために、適切なガバナンスを構築することも課題といえます。
人工知能とロボットについて
続いて司会を務めた読売新聞東京本社調査研究本部の井深太路氏とのトークセッションに移りました。その中で新妻氏は、人工知能とロボット、空間知能化への挑戦、人とロボットの未来という三つの視点から自身の考えを語りました。

人工知能とロボットについては、「今はエンジニアがロボットの動作をプログラミングしていますが、専門知識のない一人一人のユーザがロボットを好きなように使うためには、このロボットのプログラミングをいかに簡単にするか、それはロボットとの共生を考えたときに実は現実的な課題でもあるわけです」と言及したうえで、「私たち自身でロボット動作を生成できるようなロボット搭載用の生成系AIのようなものを期待している」と述べました。また人とロボットの未来については「お互いに足りないところを補い合っていくような、相互補完的な関係が理想的ではないか」と説明しています。
※2023年6月8日に開催した「中央大学×大手町アカデミア第4回 ロボットでくらしはどう変わる? ―― 知能化・共生・協働がもたらす世界」の動画はこちら。
新妻 実保子(にいつま みほこ)/中央大学理工学部精密機械工学科 教授
福島県いわき市出身。博士(工学)。2009年中央大学理工学部精密機械工学科助教,2013年同准教授,2021年同教授となり現在に至る。
専門は,空間知能化,人とロボットシステムのインタラクション。World Robot Summit Future Convenience Store Challenge の競技委員を務める。
最近の主な研究業績には,Takumi Nishio & Mihoko Niitsuma (2022) Moving objects extraction for building environmental maps describing human walking activity using a 3D LiDAR, Advanced Robotics, 36:23, 1291-1304,中島 健太, 新妻 実保子, Virtual-pet Assisted Activityにおけるバーチャルペットと身体動作が心理的及び生理的効果に与える影響, 知能と情報, 2021, 33 巻, 3 号, pp. 678-685などがある。

- 記事を共有する