

Top>Research>Rocket Fuel through Peristaltic Movement Focusing on the Large Intestine
 Index
Index

Rocket Fuel through Peristaltic Movement Focusing on the Large Intestine
―Startup company SoLARIS from Chuo University: Challenge toward Commercialization―
Taro Nakamura
Professor, Faculty of Science and Engineering, Chuo University
Areas of Specialization: Robotics and Mechatronics, Mechanical Systems, Intelligent Mechanics
Introduction
Chuo University and JAXA have developed the world’s first equipment to continuously generate solid rocket propellant (fuel). The partnership succeeded in combustion experiments for the generated propellant. On March 16, 2018, a press conference was held to discuss development details of the equipment. The equipment was realized by using creative technology called a peristaltic pump. This pump uses a soft actuation by artificial muscles to replicate the peristaltic movement of the large intestine. The equipment has the possibility to dramatically suppress the production cost of solid rockets. The development is expected to improve Japan’s presence in the space industry.
Furthermore, the equipment is scheduled to be commercialized by SoLARIS, the first official venture startup to originate from Chuo University. This paper discusses the details of the development.
Why movement of the large intestine?―The concept of the basic principle was devised in the restroom!―
Currently, mixed transportation technology is required for solid-liquid mixed fluids (fluid that is a jumble of solids and liquids) and high-viscosity fluids (a sticky fluid like honey) as final products/intermediate materials used in a variety of fields such as the generation and transportation of sediment, cement, food products, and pharmaceuticals. However, these transportation and mixing technologies include serious problems listed below.
Transportation requires a large amount of energy and equipment becomes larger.
Large force (friction/shear) is exerted between transported objects and transportation equipment. The generated heat and impact break the organizations and structures.
Different equipment is often used for mixing and transportation technologies. This series of processes forms the “batch process.” (Labor expenses are incurred and a large amount of time is required for the process. People are often involved and it is difficult to handle hazardous materials.)
Actually, I spent a long time struggling to find solutions to the problems listed above. Eventually, I arrived at the concept of using the peristaltic movement of the large intestine.
I had been considering whether the movement principles of the earthworm robot that we developed could be used to transport something. Right at that time, I got an upset stomach. While I was in the restroom holding my stomach, I started to think about the movement of my large intestines. I realized that the movement of my large intestines is the same peristaltic movement as an earthworm. I began to consider the possibility that using similar internal movement would achieve a multifunction pump capable of transportation, mixing, dewatering, etc. After leaving the restroom, I organized my thoughts. I realized that this peristaltic movement would enable transportation and mixing via small energy, and that shear would also be small. It would also enable continuous transportation and mixing. I believed that peristaltic movement could solve the three problems listed above. At that time, I had yet to develop a concept of what structure I would use to realize my idea. Even so, I intuitively thought that my idea would be a success. At the same time, I had no idea that my development would be used in so many application fields and become such a large project.
Mechanism of transportation and mixing by the large intestine
Are you familiar with how the large intestine transports bolus consumed by human beings? As shown in Figure 1, the large intestine is composed of two types of muscles: circular muscle which contracts in a radial direction and longitudinal muscle which contracts in a longitudinal direction. These muscles produce closing force in an internal direction and contractive force in a longitudinal direction. As shown in Figure 2, these movements can be linked to create the unique movements of peristaltic movement and dispersion movement, which are accompanied by contraction waves. This movement fulfills the function of transporting bolus, as well as mixing fluid/bolus during transportation.
Stated instinctually, this is similar to the movement of filling a bag with fluid and then using your hands to squeeze it from the outside to transport and mix the fluid.
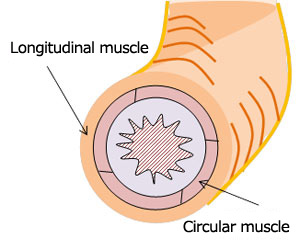
Figure 1 Muscle structure of the large intestine

Figure 2 Peristaltic movement and dispersion movement of the large intestine
Development of a peristaltic pump: About the mechanisms of a peristaltic pump
Around 2008, we developed the peristaltic pump shown in Figure 3. This pump focused on the movement of the large intestine, starting with the peristaltic movement described above. A major feature of the pump is how it achieves a pushing movement with a large surface area, gentle force, and kneading motion. However, it is extremely difficult to achieve this kind of motion in actuators which focus mainly on rotating motion; e.g. conventional motors. Most likely, the reason that pumps like the large intestine have not been proposed in the conceptual stage until now is that the movement of motors has an inherent limit.
In order to achieve this peristaltic movement, we focused on the pneumatic artificial muscle which my group had developed. This artificial muscle is a supple and strong soft actuator. By incorporating this technology, I was able to conceive a completely new structure unlike anything that has come before.
Figure 4 shows a cross-sectional view of one unit composing the pump. Artificial muscle is positioned on the outside of this unit and a rubber cylindrical tube is positioned on the inside. This made it possible to propose a structure resembling the circular muscle and longitudinal muscle of the large intestine. By pressurizing the internal air pressure, the unit contracts in the longitudinal direction. Additionally, the cylindrical tube expands in an internal direction, thus closing the inside of the unit.
Figure 5 shows vertical transport of a solid-liquid mixed fluid. Here, a solid-liquid mixed fluid with the solid content of 30% is used as a working fluid. As shown in the figure, the vertical transport of a solid fluid is possible. We succeeded in vertical transport of high-viscosity fluid of 20,000 [mPa・s] (viscosity equivalent to syrup).
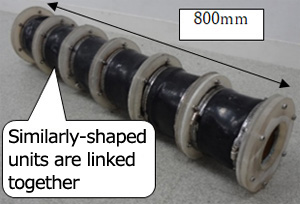
Figure 3 Overview of peristaltic pump

Figure 4 Peristaltic pump unit and its behavior

Figure 5 Vertical transport experiment for solid-liquid mixed fluid
Using a peristaltic pump to create solid rocket fuel!—Changing the concept of rocket manufacturing!
Satellites are becoming smaller due to the rapid advance of electronic products. Accordingly, the rockets which are launched are also becoming smaller. This means that there is increased demand for solid fuel rockets that are appropriate for the smaller designs. In Japan, solid fuel rockets have a long history which started from flight tests for pencil rockets by Dr. Hideo Itokawa in 1955 and has advanced to Epsilon Launch Vehicle in recent times. The high degree of perfection for rockets and launch technology in Japan is known to be world-class. On the other hand, Japan has higher costs (labor costs, etc.) than other countries. This creates a large hurdle when it comes to international competition.
The propellant of solid fuel rockets is generated by mixing/kneading solid fuel and oxidizing agent. The conventional production method is a batch method in which materials are mixed by a planetary mixer which stirs by rotating a metal blade inside of a metal bowl and then transported separately using manpower. As a result, the current production method presents difficult hurdles to cost reduction in terms of manufacturing equipment maintenance and process management. It is no easy task to review new production methods while still ensuring safety. Indeed, the production method has not changed for more than 50 years. NASA and other organizations in Western countries have attempted to develop a new method, but they were ultimately unsuccessful.
In response, we worked together with JAXA to find ways in which the principles of the peristaltic pump shown in Figure 5 can be used to solve these problems. Figure 6 shows the peristaltic movement mixing-transportation equipment that we developed. This equipment achieves safe/continuous mixing and transportation of solid propellant. Through these capabilities, we seek to revise the entire production process and achieve remarkable decreases in cost. The equipment replicates the large intestine peristaltic movement; e.g. pushing movement with a large surface area, gentle force, and kneading motion. As shown in Figure 7, this enables safe and continuous mixing of solid fuel without the need for a mixing blade, and also enables transportation to the main rocket.
In February 2018, through cooperation with JAXA and Japan Carlit Co., Ltd., we conducted the world’s first full-scale combustion testing for solid propellant by using the peristaltic movement mixing-transportation equipment. This is shown in Figure 8. The test was a wonderful success. We obtained the same output characteristics as the conventional production method.

Figure 6 Peristaltic movement mixing-transportation equipment for the production of solid propellant

Figure 7 Mixing of solid propellant
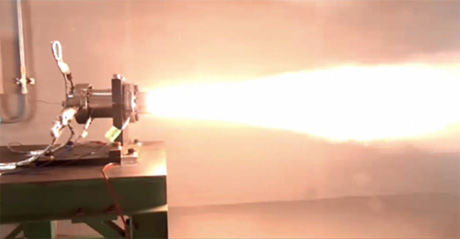
Figure 8 Combustion testing for solid rocket propellant using the peristaltic movement mixing-transportation equipment
Startup company started from Chuo University: Seeking commercialization through SoLARIS!
In September 2017, we started SoLARIS Inc., the first startup company started from Chuo University. SoLARIS was founded with the goal of commercialization based on research results achieved at Chuo University. The main founding members were myself and Assistant Professor Yasuyuki Yamada, a member of the laboratory which I operate.
Normally, we would be seeking development business for innovative technological systems based on the soft robotics and soft actuation such as artificial muscles developed at our laboratory. However, for the time being, we are focusing on the commercialization of peristaltic movement mixing-transportation equipment for solid fuel rockets, which includes our technology as a core technology. Moving forward, please expect great things from Chuo University and SoLARIS.
- Taro Nakamura/
Professor, Faculty of Science and Engineering, Chuo University
Areas of Specialization: Robotics and Mechatronics, Mechanical Systems, Intelligent Mechanics
- Taro Nakamura was born in 1975. He completed the Doctoral Program in the Interdisciplinary Graduate School of Science and Technology, Shinshu University. In 1999, he served as an assistant at Akita Prefectural University. He also served as a Full-Time Instructor in the Chuo University Faculty of Science and Engineering and as Associate Professor in the same university in 2004 and in 2006 respectively, before assuming his current position of Professor in the same university in 2013. From 2017, he has been CEO of SoLARIS Inc., a position he still holds today. From 2012 to 2013, he was a visiting professor at the Swiss Federal Institute of Technology in Lausanne. He holds a PhD in engineering. He is engaged in the development and control of soft robotics using artificial muscles, as well as the development and application of biorobotics modeled on living creatures. In 2011, he received the Young Scientists’ Prize from the Minister of Education, Culture, Sports, Science and Technology and more. His recent works include Artificial Muscle – A Graphic Representation [Zukai – Jinko Kinniku] and others.

- Research Activities as a Member of Research Fellowship for Young Scientists (DC1), Japan Society for the Promotion of Science (JSPS) Shuma Tsurumi
- Important Factors for Innovation in Payment Services Nobuhiko Sugiura
- Beyond the Concepts of Fellow Citizens and Foreigners— To Achieve SDGs Goal 10 “Reduce Inequality Within and Among Countries” Rika Lee
- Diary of Struggles in Cambodia Fumie Fukuoka
- How Can We Measure Learning Ability?
—Analysis of a Competency Self-Assessment Questionnaire— Yu Saito / Yoko Neha - The Making of the Movie Kirakira Megane