

Top>Research>Coexistence between humans and robots ~An approach based on intelligent space and ethology~
 Index
Index

Mihoko Niitsuma [Profile]
Education Course
Coexistence between humans and robots
~An approach based on intelligent space and ethology~
Mihoko Niitsuma
Assistant Professor of Human Interfaces, Intelligent Space and Human-Robot Interactive Communication, Faculty of Science and Engineering, Chuo University
Introduction
I am conducting research at the Human-System Laboratory (Department of Precision Mechanics, Faculty of Science and Engineering) about mechanisms for coexistence between humans and robots. First of all, there are various obstacles in order to have a robot operate in a human living environment. For example, humans know where they are in their own space without paying any special attention, but it is difficult for robots to do the same. Here, I will introduce intelligent space as an approach in where functions are realized in which robots can move around living spaces and locate humans. Next, even supposing that a robot can freely move around a living space, if the robot cannot take messages and orders from humans, it cannot respond. Also, in communicating something to humans, it must be presented in a form that humans can understand or the message will not be communicated. By calling the exchange of information and messages, "communication", I will introduce methods using knowledge in ethology as a method to realize communication between humans and robots.
Intelligent space as a platform for realizing coexistence between humans and robots
In order for robots to operate in the same environment as humans, it is necessary for them to know the surrounding environment in the same way as humans. Take a school classroom for example. The classroom has a doorway, there is a blackboard or screen on the wall, and many desks are lined up. When a human enters the classroom and wants to head towards the blackboard, they will look for a passageway and take that passageway toward the blackboard. So then, what would a robot do? Unless the robot can fly in the air, it will not reach the blackboard without finding a passageway to progress along and not bump into the desks. To realize this, the robot must be equipped with a sensor to calculate distances to surrounding objects. By calculating the distance to objects using this sensor, the robot can find an area to be covered without hitting the desks and progress.

Then, what would happen if the purpose of this robot was to follow behind a human and carry things? The robot must not only avoid surrounding obstacles, but it must also travel without losing sight of the human. In an environment where there are many other people, the robot must differentiate between the person it must help and the others, and follow that person while avoiding the other people and obstacles. There are many situations like these we must consider which are simple for humans to perform but need to be conducted by robots as well.
One reason for robots facing difficulties in moving in real space is that human living spaces have been created for humans and are not entirely easy for robots to operate in. Another reason is that there is a restriction to sensors and computers that can be installed in the robots, so they can only measure a limited area of the surrounding environment. But, if the robot can understand its own location and destination as well as the location of obstacles, it can successfully reach its destination smoothly. If a robot can use the necessary information appropriately, it can adequately operate in a human living space. So, is there any way we can aid a robot in moving in the space without making large alterations to the human living space? Here, we need to observe human and robot activity from the space.
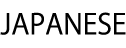
Intelligent Space concept
(Space with spatial intellect applied to it is called Intelligent Space(iSpace)
The sensors are not only installed in the robots, but must also be placed in the spaces. Because there is a limit to the range a sensor can measure, multiple sensors are set up. Then, by connecting to each network, a wide space, which cannot be measured by a single sensor, can be measured. Cameras and laser range sensors are installed in the space, and if they calculate the positions of the humans, robots and obstacles, there is no need for the robot to measure the positions itself. This can happen if the robots possess a function which receives the necessary information to move from the space. On the other hand, the space will possess a function which processes the sensor data, calculates the essential information, and provides that information. Furthermore, this can be useful for monitoring the location of humans and objects for security purposes, so it can be utilized by not only robots, but humans as well.
The appearance of the space is observed by the sensors which have been installed throughout, with useful information being extracted in order to present the necessary information. Then, by appropriately controlling the instruments of the robot etc in accordance with the observation results, the robot will work in response to the human. This series of processes is called intelligent space [1].
Robots will exist in the same living space as humans, and through spatial intellect, the robots will be able to move freely. Next, I would like to introduce communication between humans and the robots they live with, using an ethological approach.
Human-robot communication based upon ethology
When humans and robots continuously exist together in the same space, how can we create a relationship between the humans and robots that can be maintained over a long term? I would like to turn your attention to knowledge acquired from ethology as an approach to realize this. That is the relationship between humans and dogs.
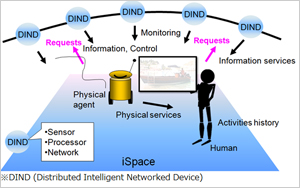
Monitor aid system using intelligent space and robots
Dogs are one of the few nonhuman species that can build a social relationship with, and live together with humans. Ethologists claim the main reason behind this is that humans can interpret a dog's behavior without prior knowledge or specialist training, and a dog acts appropriately in a timely manner. Ethology not only observes a dog's bodily movements, but also environmental changes to the dog's surroundings and how the dog reacts in accordance to those changes. Take, for example, a dog and its owner in a restricted space. Research is conducted from observations of how the dog behaves when the owner leaves that space. Of course, the behavioral characteristics of every dog are different. Where there are friendly dogs, there will also be highly cautious dogs. Creating a model (rules) of environmental changes and dog behavior, as well as behavioral characteristics, that can be used by robots, is a topic for the realization of a robot that can communicate with humans. On the other hand, as previously mentioned, observing such changes in environment is a strong point of intelligent space. Accordingly, by combining ethology with intelligent space, we can get closer to realizing a robot which can act appropriately to changes in its environment.
Research is currently being conducted into human-robot coexistence, with sensors put in place and used to monitor space and robots to provide information on the situation.
Toward a coexistent space for humans and robots
What is appealing about intelligent space is that its functions aren't completed by just the space, humans or robots. The space observes the behavior of the humans and robots by way of sensor, and extracts meaningful information through a calculator. For example, by extracting a route walked by a human, it is possible to program a robot to take that route [2]. Also, by observing human actions, it is possible to learn how the human utilizes that space [3]. That is to say, no information can be gathered if humans or robots are not active in the actual environment, so the space will not become intelligent. Also, when the space provides information and functions, the robot can move cleverly, leading to the aiding of human activities. I believe that this mutual complementary relationship is the beginning of coexistence. A relationship of trust between humans and robots cannot be built from the outset. However, if they live together over a long term without losing interest, I am sure we can hope for some kind of bond to grow between humans and robots.
References
- [1] Hideki Hashimoto and Akiko Watanabe, "Intelligent Space Design The Merging of Construction, Robotics and IT", NTT Publishing Co., Ltd., 2004.
- [2] Takeshi Sasaki, Drazen Brscic and Hideki Hashimoto, "Human Observation Based Extraction of Path Patterns for Mobile Robot Navigation," IEEE Transactions on Industrial Electronics, Vol.57, No.4, pp.1401-1410, 2010.
- [3] Mihoko Niitsuma, and Hideki Hashimoto, "Observation of Human Activities Based on Spatial Memory in Intelligent Space", Journal of Robotics and Mechatronics, Vol. 21, No. 4, pp. 515-523, 2009.
- Mihoko Niitsuma
Assistant Professor of Human Interfaces, Intelligent Space and Human-Robot Interactive Communication, Faculty of Science and Engineering, Chuo University - Born in Iwaki City, Fukushima Prefecture in 1979.
In 2007, completed the Doctoral Program of the Department of Electrical Engineering and Information Systems, Graduate School of Engineering, University of Tokyo.
Doctor of Engineering (University of Tokyo)
Research fellow at the Japan Society for the Promotion of Science from 2007 to 2009.
(Postdoctoral fellow at the Hashimoto Laboratory, Institute of Industrial Science, University of Tokyo)
Appointed Got her current position in April 2009
Involved in research relating to intelligent space and human interfaces in intelligent space, and human-robot interaction.
http://www.mech.chuo-u.ac.jp/~hslab/

- Research Activities as a Member of Research Fellowship for Young Scientists (DC1), Japan Society for the Promotion of Science (JSPS) Shuma Tsurumi
- Important Factors for Innovation in Payment Services Nobuhiko Sugiura
- Beyond the Concepts of Fellow Citizens and Foreigners— To Achieve SDGs Goal 10 “Reduce Inequality Within and Among Countries” Rika Lee
- Diary of Struggles in Cambodia Fumie Fukuoka
- How Can We Measure Learning Ability?
—Analysis of a Competency Self-Assessment Questionnaire— Yu Saito / Yoko Neha - The Making of the Movie Kirakira Megane