How Will Robots Change Our Lives? The World Brought About by Intelligence, Coexistence, and Collaboration
Fourth Collaborative Course with Otemachi Academia
Mihoko Niitsuma/Professor, Department of Precision Mechanics, Faculty of Science and Engineering, Chuo University
Otemachi Academia is a collaborative course, organized jointly by Chuo University and Yomiuri Newspaper. The course aims to disseminate the knowledge accumulated at Chuo University. In the fourth collaborative course, Professor Mihoko Niitsuma of the Faculty of Science and Engineering gave a lecture on coexistence between humans and robots. This feature will go over what was covered in the course.
Pursuing the ideals of people and society
We already live in an information society where digitized information is widely used in business and communication, but people have had to put forth effort to manually input data and to access it. The Society 5.0 initiative proposed by the government is based on the idea of implementing technology to acquire, accumulate, and utilize data with as little human involvement as possible, with the goal of solving issues for the achievement of a sustainable society, with smart cities being the venues for putting these ideas into practice. In line with these goals, various technologies, including robotics, are expected to be implemented in various day-to-day situations, such as disaster prevention, autonomous driving, logistics, healthcare, medical care, and nursing care.
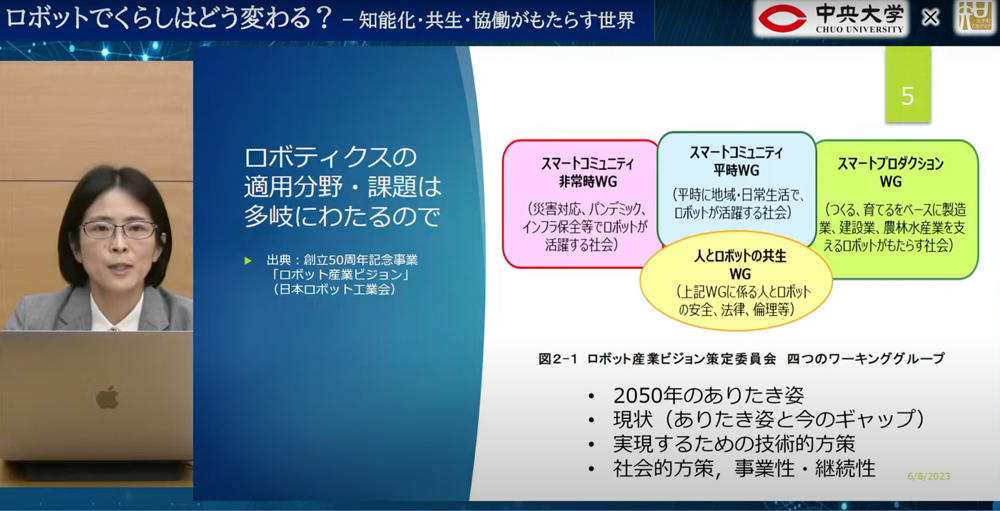
Various fields have different outlooks on the use of robots in future society. Here, we will introduce the "Robot Industry Vision 2050 (Ver. 0)," which commemorates the 50th anniversary of the founding of the Japan Robot Association. This initiative aims for a state of well-being (including physical, mental, and social well-being, in which individual rights and self-fulfillment are guaranteed) to be achieved by the year 2050, and proposes how robots can contribute to achieving this goal.
For example, in the event of a disaster, humans and robots would ideally be able to work together at disaster sites for quick recovery through rescue, search activities, hazardous materials disposal, and work at heights. The aim is to create a robotics system that can carry out search and rescue activities without time or space constraints. In addition, we can expect that standardizing the key components that comprise robots, such as hand technology and communication technology, will lead to effective preparation for emergencies by making robot technology used in daily life also available for use in emergencies.
For robots that support day-to-day necessities, we can have them perform specialized services such as childcare, nursing care, and education, while also using them to substitute for household functions such as doing the laundry and cleaning at home. For example, in the field of nursing care, robots can be expected to help reduce the workload and mitigate the labor shortage. The introduction of robots can also free people from domestic work and allow people to engage in activities that they want to focus on more. It can also help transform childcare, nursing care, education, and other activities that are restricted to the home, into open activities that connect with society through robots.
Furthermore, in relation to society, we can expect that the constant observation and long-term accumulation of healthcare data will lead to early detection of health changes and provide awareness to users. Similarly, the constant observation and early detection of changes can be applied not only to human health, but also to data related to various settings. For example, the constant observation of traffic volume and noise, and utilization of the accumulated data can help us achieve safe and efficient traffic management and logistics systems.
In addition, in manufacturing and production sites, and other environments where people work, we can expect to see more collaboration with robots. With regard to collaborative work with robots, if robots can take on some of the tasks that they perform especially well, people can focus more on the aspects of production that require the flexibility, mobility, and skills unique to humans. Furthermore, if robots can be remotely controlled to engage in activities that transcend physical, temporal, and spatial constraints, we can expect this technology to promote work-sharing, lead to flexible work styles and use of skills, and contribute to solving labor shortages.
To achieve coexistence between humans and robots
People's living environments can be broadly divided into the physical environment and the mental environment. The knowledge accumulated in robotics has been systematized through the knowledge gained from activities in physical space, such as how to climb stairs and grasp objects. However, in order for robots to coexist with us in the human life environment, we need to consider how robots should behave not only in the physical environment, but also in day-to-day life environments, including cultural and social environments.
In the field of robotics, there are efforts to promote technological innovation through identifying technical challenges and fields, as well as by holding competitions. I will now introduce a competition that focuses on the utilization of robotics in convenience stores.
In a robot competition called the Future Convenience Store Challenge, autonomous robots compete to perform shelf-stocking and disposal tasks, toilet cleaning tasks, and customer service tasks in convenience stores. In this context, what we call "autonomous robots" refer to robots that can recognize, judge, and execute tasks assigned to them without human operation.
In the shelf-stocking and disposal tasks, the challenge focuses on how the robot interacts with various objects such as pouch food, rice balls, and lunch boxes according to the purpose in convenience stores designed for people. In the toilet cleaning tasks, the objective is to find randomly placed stains or garbage, and then wipe them up or collect them. Another key objective in shelf-stocking and cleaning tasks is to complete them in a way that satisfies the necessary criteria from a human point of view, such as the level of orderliness and cleanliness. These perspectives are reflected in the rules. Customer service tasks also require cooperation between human staff and robots, and autonomy is required based on human cultural and social rules, such as the division of roles between humans and robots and the ability to work with customers in a way that can be understood. In this way, the competition focuses not only on how well robots can perform physical tasks, but also on their behavior in the cultural environment of humans.

The following section of this article will introduce the actual work being done in Niitsuma's lab, and through that, we will share the key points of the Society 5.0 initiative, with a focus on automatic digitization, intelligent robot systems that utilize accumulated data, and the collaborative work between intelligent robot systems and people. We will also cover the actual technologies being used and their effectiveness, as well as future challenges.
First, we will introduce an experiment demonstrating autonomous street directions using robots. Here, we use an approach called spatial intelligence. Specifically, sensors installed in the environment measure people and objects in the space, and convert events into data. The data is then processed according to the purpose of use, and are then used for situational recognition. Based on the situations being recognized, information is shared with the robot so that it can achieve the goals and perform actions autonomously. In order to successfully provide autonomous street directions, sensors installed in the environment are used to acquire data such as how frequently a specific person uses the space, and their walking paths. Based on this data, it estimates whether a person knows this environment or is walking toward the destination, and if it appears that the person does not know the environment and does not know the destination, the robot sets the person as the destination, autonomously moves to them, and offers directions. Even if the robot itself cannot determine the position and situation of a person, it can understand the spatial situation and work autonomously by integrating it as a spatial intelligence system. This approach is called spatial intelligence.
Next, let's look at collaborative work between humans and robots. Some of the more important criteria for easier collaboration with robots include ensuring that the robots do not move too fast, and that the robot's intentions when working and moving are easy to read. The spatial intelligence approach is effective for robots in selecting appropriate tasks in a way that accommodates human work conditions. On the other hand, as the workforce diversifies, it will become increasingly necessary to design robots that present information and provide task support in ways that accommodate the unique characteristics of workers. In addition, although the robot's behavior is determined according to the situation, if the robot's behavior and aim cannot be interpreted, it can lead to an unclear reading of the situation, which can cause users to distrust the robot.
Finally, we will introduce a few of the social challenges we face related to the coexistence of humans and robots, based on the discussions surrounding the Robot Industry Vision 2050 (Ver. 0).
We tend to focus mostly on technological development, and think that technologies must be absolutely safe in order for them to be viable, but the Robot Industry Vision identifies the necessary social framework for introducing robots into human society, which includes a three-pronged approach that comprises technological development, appropriate safety standards, and an insurance system that covers possible risks.
From the perspective of technological development, we believe that it is a prerequisite to work on reducing risks through intrinsic safety design and functional safety, and to estimate and disclose residual risks that are generally foreseeable. However, putting too much emphasis on risk may stifle innovation, such as by limiting the ability to make the most convenient use of robots, or even making it difficult to introduce the use of robots at all.
In addition to establishing appropriate safety certification systems and insurance systems, we may need to update our concept of risk that distinguish between unacceptable and acceptable areas of risk, and those in between, from the perspective of "reasonable feasibility in risk reduction."
New technologies can have significant benefits, but they are often accompanied by risks. Another challenge is to build appropriate governance in order to maximize benefits and minimize risks.
Artificial intelligence and robots
The course then moved on to a talk session with Taiji Ibuka of the Research and Study Division of Yomiuri Shimbun's Tokyo headquarters, who served as the moderator. During this session, Niitsuma shared her thoughts from three perspectives: artificial intelligence and robots, the challenge of spatial intelligence, and the future of humans and robots.

Regarding artificial intelligence and robots, she said, "Currently, engineers are programming robots, but for the layman without specialized knowledge to use the robots as they see fit, we have to face the practical challenges of simplifying the programming when talking about coexistence with robots." She then added, "We are looking forward to something like generative AI for robots that users can rely on to generate robot movements." Regarding the future of humans and robots, she explains, "Ideally, a mutually complementary relationship would be one in which we can compensate for each other's deficiencies."
* Click here for the video of the "Fourth Collaborative Course with Otemachi Academia: How Will Robots Change Our Lives? The World Brought About by Intelligence, Coexistence, and Collaboration" held on June 8, 2023 (available ony in Japanese) .
Mihoko Niitsuma/Professor, Department of Precision Mechanics, Faculty of Science and Engineering, Chuo University
Mihoko Niitsuma was born in Iwaki, Fukushima Prefecture. She has a Ph.D. in Engineering. She became an assistant professor at the Department of Precision Mechanics, Faculty of Science and Engineering, Chuo University in 2009, an associate professor in 2013, and a professor in 2021, which is her current post.
She specializes in spatial intelligence and human-robot system interactions. She is a member of the competition committee of the World Robot Summit Future Convenience Store Challenge.
Recent research achievements include Takumi Nishio & Mihoko Niitsuma (2022) Moving objects extraction for building environmental maps describing human walking activity using a 3D LiDAR, Advanced Robotics, 36:23, 1291–1304; and Kenta Nakajima & Mihoko Niitsuma, Effects of Virtual Pet and Exercise on Virtual-Pet Assisted Activity, Journal of Japan Society for Fuzzy Theory and Intelligent Informatics, 2021, Volume 33, Issue 3, pp. 678–685.

- Share articles